行星齿轮传动的类型很多,其分类方法也不少。在我国根据前苏联学者库德略夫采夫(B.H.Kyπρβ)提出的按照行星齿轮传动基本构件的不同来进行分类。该分类方法在我国具有较大的影响,且早已在我国齿轮界被普遍采用和接受了。另外,根据机械工业部JB1799――76行星齿轮减速器标准,采用了按齿轮啮合方式的分类方法,在我国该分类方法也在逐渐地推广应用中。现将上述两种分类方法分别阐述如下。
一、库德略夫采夫的分类法
在库氏的分类方法中,行星齿轮传动的基本代号为:Z――中心轮,X――转臂,V――输出轴(现说明:在库氏原著作中,K―中心轮,H―转臂)。根据其基本构件的配置情况,可将行星齿轮传动分为2Z-X、3Z和Z-X-V三种基本传动类型;其他的结构型式的行星齿轮传动大都是它们的演化型式或组合型式。
1 Z-X型行星齿轮传动
如果行星齿轮传动的基本构件包括有两个中心轮z和转臂x的话,则该行星齿轮传动的类型代号为2Z-X,图1-2和图1-3所示为较常见的2Z-X型的传动简图。当转臂x固定时,若该行星齿轮传动中的中心轮a与内齿轮b的转向相反,即其转臂x固定的传动比ix<0,则称其为2Z-X型的负号机构。当转臂x固定时,若中心轮a与b,或者中心轮b与e的转向相同,即其传动比ix>0,则称其为2Z-X型的正号机构。
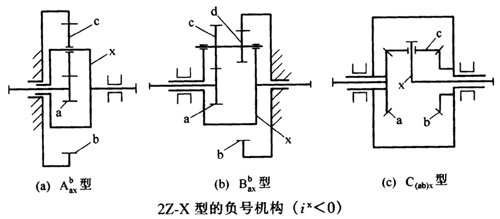
图1-2
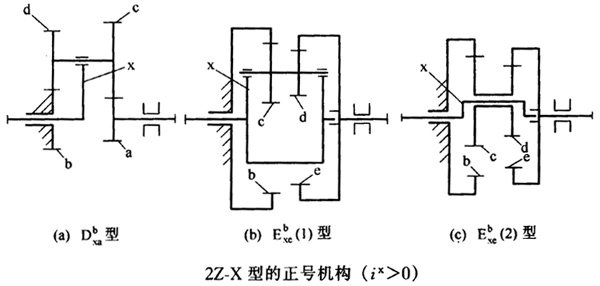
图1-3
为了使2Z-X型和3Z型行星齿轮传动中的各种传动型式都有一个确定的传动代号,便于人们分析研究各种传动型式的运动学、受力分析和效率计算以及强度计算等问题,本书规定采用字母A、B、C…附加一个上角标和两个下角标来表示其传动类型代号;上角标表示固定构件,第一个下角标表示输入的基本构件,第二个下角标表示输出的基本构件。例如,图1-2(a)所示的2Z-X型(ix<0)行星齿轮传动,可用传动代号Aaxb表示。显然,对于由Aaxb型行星齿轮传动演化而成的差动行星齿轮传动见图1-1(a)和准行星齿轮传动[见图1-1(c)],则可分别用传动代号Aa(xb)(或A(ax)b)和Aabx表示。
由于Aaxb型行星齿轮传动具有结构简单、制造容易,外形尺寸小,质量小,传动效率高等特点。在结构合理的条件下,通常,其传动比范围为iaxb=2.8~13,传动效率ηaxb=0.97~0.99。目前该传动类型已获得了较广泛的应用。
图1-2(b)所示的具有双齿圈行星轮c-d的2Z-X型(ix<0)传动型式,可用传动代号Baxb表示。其合理的传动比范围为iaxb=7~16,传动效率仍较高;但由于采用了双齿圈行星轮,故制造安装较复杂些。
图1-2(c)所示为圆锥齿轮的2Z-X型(ix<0)行星齿轮传动,用传动代号C(ab)x表示。该行星传动主要用于差动齿轮装置;这种传动型式的差速器在汽车、坦克、拖拉机和金属切削机床及仪器等齿轮传动装置中已获得广泛的应用。
图1-3(a)所示的2Z-X型(ix>0)行星齿轮传动,用传动代号Dxab表示。按其传动比的绝对值来说,ixab可以达到很大的值。但由于其具有双外啮合的齿轮传动,啮合摩擦损失较大,故其传动效率较低,一般,该D型行星齿轮传动基本上不用于传递动力。
图1-3(b)所示2Z-X型(ix>0)行星齿轮传动(nP≥3),用传动代号Exeb(1)表示。其合理的传动比范围为ixeb=8~30。由于它具有双内啮合的齿轮传动,其啮合摩擦损失较小。当传动比ixeb<50时,其传动效率ηxeb值可达0.8以上。但随着传动比ixeb的增加其效率ηxeb值会降低。
图1-3(c)所示的少齿差2Z-X型(ix>0)行星齿轮传动(nP=1),用传动代号Exeb(2)表示。其合理的传动比范围为iabe=30~100。由于它具有(Zb-Zc)少齿差的内啮合齿轮传动,其啮合摩擦损失较小,故该行星齿轮传动的传动效率较高,ηabe值可达0.9。
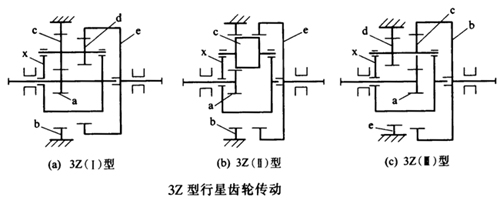
2.3Z型行星齿轮传动
在图1-4所示的3Z型行星齿轮传动中,其基本构件是三个中心轮a、b 和e,故其传动类型代号为3Z。在3Z型星传动中,由于其转臂x不承受外力矩的作用,所以,它不是基本构件,而只是用于支承行星轮心轴所必需的结构元件,因而,该转臂x又可称为行星轮支架(简称为行星架)。
图1-4
在3Z型行星齿轮传动中,较常见的传动型式有如下三种。
(1)3Z(Ⅰ)型 具有双齿圈行星轮的3Z型行星齿轮传动,如图1-4(a)所示。它的结构特点是:内齿轮b固定,而旋转的中心轮a和e 分别与行星轮c和d相啮合,故可用传动代号3Z(Ⅰ)表示。在各种机械传动中,它已获得了较广泛的应用。3Z(Ⅰ)型较合理的传动比范围为iabe=20~300,其传动效率ηabe=0.8~0.9。
(2)3Z(Ⅱ)型 具有单齿圈行星轮c的3Z型行星齿轮传动,如图1-4(b)所示。该3Z型行星传动的结构特点是:三个中心轮a、b和e同时与单齿圈行星轮c相啮合;即内齿轮b固定,两个旋转的中心轮a和e同时与行星轮c相啮合,故可用传动代号3Z(Ⅱ)表示。它是一项较新型的行星齿轮传动,目前该项传动新技术在我国的齿轮传动中已获得了日益广泛的应用。3Z(Ⅱ)型合理的传动比范围为iabe=50~300,其传动效率为ηabe=0.70~0.84。
(3)3Z(Ⅲ)型 具有双齿圈行星轮的3Z型行星齿轮传动,如图1-4(c)所示。它的结构特点是:内齿轮e固定,两个旋转的中心轮a和b与同一个行星轮c相啮合,而另一个行星轮d与固定内齿轮e相啮合;故可用传动代号3Z(Ⅲ)表示。它的传动比iabe范围和传动效率与3Z(Ⅰ)型基本相同。因此,在实际应用中,一般很少采用3Z(Ⅲ)型行星齿轮传动。
在此,应该指出的是:3Z型行星齿轮传动用于短期间断工作的机械传动装置中最为合理,它具有结构紧凑、传动比大和传动效率较高等特点。但3Z型行星传动制造和安装比较复杂。当中心轮a 输出时,在传动比|i|大于某个值后,该行星齿轮传动将会产生自锁。其中,3Z(Ⅱ)型行星传动的结构更加紧凑,制造安装较3Z(Ⅰ)型的简单。但由于在3Z(Ⅱ)型行星传动中,其内齿轮b和e 的齿数不相等,即zb≠ze;而且公共行星轮c既要与中心轮a相啮合,同时又要与内齿轮b和e相啮合,故该3Z型行星传动必须采用角度变位。在进行角度变位计算时,其各个齿轮应选择不同的变位系数,以保证各啮合齿轮副具有相同的角度变位中心矩a′,以满足3Z(Ⅱ)型行星齿轮传动的同心条件。但由于3Z(Ⅱ)型行星传动进行角度变位后的啮合角a′大于压力角a,即a′>a=20°,故其传动效率较3Z(Ⅰ)型的要低些。
3.Z-X-V型行星齿轮传动
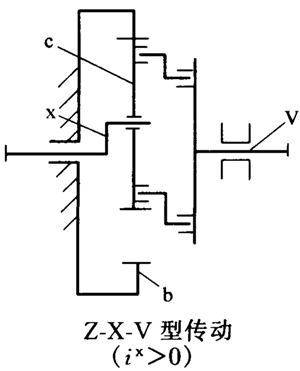
如果把2Z-X(A)型传动中的齿轮a去掉,而且将行星轮c的直径增大,并使内齿轮b与行星轮c的齿数差变得很少;然后将从动轮c的运动通过机构W传到输出轴V,则可构成一个由转臂x主动和行星轮c从动的少齿差行星齿轮传动(见图1-5)。
在少齿差行星齿轮传动中,其基本构件是一个中心轮b(代号Z)、转臂x和输出轴V,故其类型代号为Z-X-V。由于行星轮c的轴线与输出轴V存在一个偏心距离,因此需要设置一个将行星轮c的回转运动传递到输出轴的V的、传动比等于1的输出机构(即W机构)。由于该行星传动的啮合齿轮副仅有一个c-b传动形式,故它不必再用其他的传动代号。渐开线少齿差行星齿轮传动和常见的摆线针轮行星传动大都属于Z-X-V型行星传动。
图1-5
Z-X-V型渐开线少齿差行星齿轮传动的传动范围为ixvb=10~100,传动效率为η=0.75~0.
93。结构紧凑、体积小、加工方便,但行星轮轴承的径向力较大,适用于中小功率,一般p≤18kw,个别的达到20~45kw;传动比较大,适用于短期工作。若采用摆线针轮行星传动,则适用于功率P≤100kw,任何工作制度,其传动效率为η=0.90~0.97。目前应用较广泛,但制造精度要求较高,且高速轴转速nx≤1500r/min。
二、按齿轮啮合方式进行分类的方法
如前所述,按照原机械工业部关于行星齿轮减速器标准JB1977―1976,国内已采用了将行星齿轮传动按其啮合方式的不同来进行分类。该分类方法通常采用了如下的基本代号:
N――内啮合齿轮副;
W――外齿合齿轮副;
G――同时与两个中心轮相啮合的公共齿轮。
根据行星齿轮传动所具有的啮合方式,可以把行星齿轮传动类型分为:
NGW――具有内啮合和外啮合,同时还具有一个公共齿轮的行星齿轮传动;
NW――具有一个内啮合和一个外啮合的行星齿轮传动;
WW――具有两个外啮合的行星齿轮传动;
NN――具有两个内啮合的行星齿轮传动;
NGWN――具有两个内啮合和一个外啮合,同时还具有一个公共齿轮的行星齿轮传动;
N――仅具有一个内啮合的行星齿轮传动。
例如,图1-2(a)所示的2Z-X型负号机构(ix<0)行星齿轮传动,其传动代号为Aaxb。
由于该行星传动具有c轮与b轮的内啮合(N)和a轮与c 轮的外啮合(W),同时还有与中心轮a和b轮相啮合的公共齿轮c(G),因此,2Z-X(A)型行星传动的传动类型为NGW型。对于2Z-X(B)型传动[见图1-2(b)],由于它具有一个内啮合(N)和一个外啮合(W),故其传动类型为NW型。仿上,对于图1-2(c)所示的圆锥齿轮差动行星传动,由于它具有两个外啮合(W),故可用字母WW表示它的传动类型。
对图1―3所示的2Z-X型正号机构(ix>0),其传动代号为Dxab的行星传动〔见图1-3(a)〕,由于它具有两个外啮合(W),故其传动类型为WW。传动代号为Exeb(1)和Exeb(2)的行星传动[见图1-3(b)和1-3(c)],由于它们均具有两个内啮合(N),故其传动类型为NN。
对于图1-4所示的3Z型行星齿轮传动,即传动代号为3Z(Ⅰ)、3Z(Ⅱ)和3Z(Ⅲ)型行星传动,由于它们均具有两个内啮合(N)、一个外啮合(W),同时还具有一个公共齿轮(G),故其传动类型为NGWN型。图1-5所示的Z-X-V型行星传动,由于它仅具有一个内啮合(N),故其传动类型为N型。
在此讨论行星齿轮传动的传动类型时,还应该说明的是:根据《机械原理》可知,在前面所讨论的定轴齿轮传动、行星齿轮传动和差动齿轮传动均属于基本齿轮传动。可以将两个或几个基本齿轮传动连接成为一个组合齿轮传动机构。按照不同的组合方式,可以获得许多种类的组合行星齿轮传动机构。例如,将两2Z-X型行星传动串联起来,则可得到双级行星齿轮行动(见图8-1)。在差动行星齿轮传动[见图1-1(a)]中,将其中心轮a(或b)与转臂x之间,或者两个中心轮a、b之间用其他基本齿轮传动将它们组成相互封闭的齿轮传动链,则可获得封闭行星齿轮传动。