概述
装配机器人是柔性自动装配中最重要的部分。机器人的含义有一些不同的解释。美国机器人协会(RIA)规定机器人的定义为:机器人是一种可重新编程的多功能操作者,用来搬运物料、零件、工具或专门装置,通过可变编程动作来执行各种作业任务。
根据机器人的定义,可以将机器人分为两大类,即伺服型和非伺服型,伺服型机器人的运动完全由计算机控制,通过编制计算机程序控制机器人的运动。非伺服型机器人每个坐标的运动通过可调挡块由人工设定。
机器人运动轨迹控制有点位控制和连续运动控制两类。前者在规定的两个点之间的运动为随机性轨迹,后者记录下轨迹上的多个点,运动时加以重视。
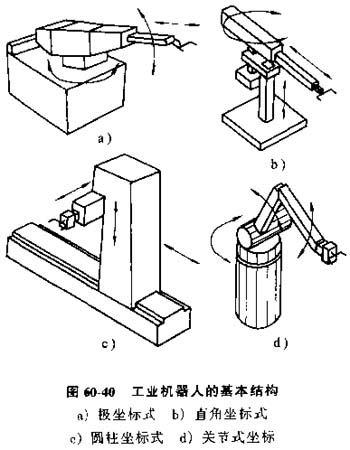
机器人的基本结构有四种:直角坐标、极坐标,圆柱坐标和关节式坐标,见图60-40。
装配机器人要求较高的重复定位精度,通常采用水平关节或带有X、Y、Z平移轴和龙门式结构的机器人。正确选用抓取机构对装配作业十分重要,当单个手爪难以完成部操作时,需要采取复合手爪安装和自动更换。
机器人驱动系统传统做法是伺服型采用液压系统,非伺服型采用气动系统。现在的趋势是用电气系统作为主驱动,大功率的机器人用液压驱动,气动系统装配操作的功率较小、较清洁、结构较紧凑,适合柔性装配系统。