工业机器人是一种独立的,具有计算机控制系统,可编程的,用以搬运物料,零件和工具或完成多种操作功能的自动化机械装置。它的特点是工作范围大,定位精度高,通用性强,适用于中、小批量、多品种生产的自动化系统中。
工业机器人是由操作系统(手部、臀部、立柱或机身)、驱动系统、控制系统和位置检测系统组成。
1. 搬运机器人的坐标形式及规格参数
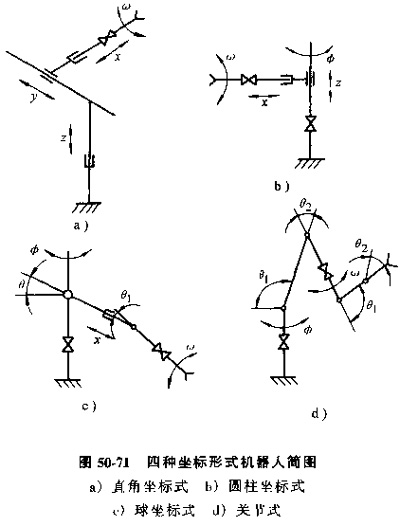
根据手臂三个动作自由度的不同运动组,机器人有四种运动坐标形式。图50-71所示是四种坐标形式机器人的简图。
1) 直线坐标式。如图50-71a所示,手臂动作由三个直线运动x、y、z组成,若Lx、Ly、Lz、表示三个直线运动的最大2,其空间作业范围为Lx×Ly×Lz的立方体(mm3)。
2) 圆柱坐标式,如图50-71b所示,手臂运动由两个直线运动x、z和一个绕z轴的回转运动组成,其空间作业范围为空中圆柱体的一部分,可用下式表示:
3) 球坐标式,如图50-71c所示,手臂运动由直线运动x和两个扰y、z的运动组成,其空间作业范围为空心球体的一部分,可用下式表示:
4) 关节式,如图50-71d所示,手臂运动由三个回转运动组成,其空间作业范围为多圆狐叠合球体。
工业机器人的运动坐标形式及其特征见表50-17。
在选用工业机器人时应注意以下规格和参数:
1) 抓重。即机器人抓取物体允许的最大重量,是表明机器人负载能力的技术参数。
2) 工作行程,即机器人各动作自由度的最大工作行程,如直线运动的行程若Lx、Ly、Lz、回转角度φ、θ等。
3) 运动速度
4) 定位精度。一般指取、放物料或运动轨道的重复精度。定位精度与2方式、构件的精度、刚度、抓重及运动速度有关,表50-18列举了各种方法的定位精度及其特点。
50-17工业机器人的运动坐标形式及其特征比较
|
坐标形式 |
极限作业空间 |
惯性 |
定位精度 |
定向特征 |
直观性 |
结构特点 |
占地面积 |
应用情况 |
特征及应用范围 |
|
大小 |
形状 |
|
直角坐标式 |
小 |
立方体 |
较大 |
容易控制 |
好 |
好 |
简单 |
大 |
较多 |
适用于直移式机械手,架空方便,宜作直线传送及长方体的作业空间采用,能抓取地面上的工件并保持工件原方位 |
|
圆柱坐标式 |
较大 |
空间柱体 |
较大 |
容易控制 |
较好 |
较好 |
较简单 |
较小 |
较多 |
适用于圆狐形轨迹作业机械手,宜作狐形传送及圆柱体作业空间采用,不能抓取地面上工件,能改变工件一个轴向的方位,不宜作直线传送 |
|
球坐标式 |
大 |
扇形截面旋转体 |
较小 |
不易控制 |
差 |
差 |
较复杂 |
较小 |
较多 |
能抓取地面上工件。能改变工件两个轴向的方位,适用于扇形截面的回转体作业空间,不宜作直线传送,经简化自由度即成平面级坐标式 |
|
多关节式 |
大 |
球体 |
较小 |
不易控制 |
差 |
差 |
复杂 |
小 |
少 |
臂能折叠,能抓取地面上的工件并传送到任意方向,宜作复杂动作,能改变工件三个轴向的方位 |
|
复合坐标式 |
大 |
柱体 |
较大 |
不易控制 |
差 |
差 |
复杂 |
较小 |
少 |
能扩大作业范围,并具有各类运动坐标形式的部分特点,适合用于多工位的移动式作业及科学探索等情况 |
50-18各种定位方法的定位精度及其特点
|
定位装置 |
重复定位精度/mm |
实现定位的方法 |
优点 |
缺点 |
应用情况 |
|
机械挡块 |
±1~±0.02 |
挡块控制液压(气)缸行程 |
结构简单可靠 |
调整麻烦多为固定定位 |
定位前实现完全缓冲,其定位精度可达±0.01mm |
|
机械结构 |
±0.2~±0.05 |
凸轮、连杆、摆动导杆等 |
结构可按需要设计 |
需自行设计,无标准需经试制 |
可实现多点定位适于专用机械手 |
|
崖压缸端部定位 |
±1~±0.02 |
活塞紧靠液压缸端部 |
当不能安装外部挡块时用此装置较好 |
如未经完全缓冲,会产生碰撞液压缸端部 |
多用于关节式机械手及工业机器人 |
|
多级液压缸多级定位 |
±0.05 |
控制各级液压缸由路实现多种行程的组和尺寸 |
可作较大范围的高精度多点定位 |
液压缸长,管道多,结构复杂 |
卡在0~750mm范围内按0.5倍关系任意组合行程尺寸 |
|
可调活塞定位 |
±0.5~±0.2 |
调整活塞总长改变行程长度 |
在有限范围内能去级调整行程 |
结构复杂 |
在有限范围内作多点定位 |
|
电气开关 |
±3~±5 |
按时间或行程发信号 |
结构简单 |
受惯性力及油温影响大 |
利用检测信号关闭电磁阀 |
|
附加定位机构 |
±0.5左右 |
活塞部件加简形气缸通入压缩空气制动 |
停止时如超出规定位置可使缸饭向以保证定位精度 |
起动时缸的速度慢 |
用于气动机械手及工业机器人 |
|
电液伺服 |
±1~±0.5 |
控制进由路关闭 |
能任意定位 |
制造困难、价贵 |
用于工业机器人 |
|
步进电动机 |
±2~±0.02 |
控制脉冲数 |
能任意定位 |
复杂,价贵 |
用于工业机器人 |
4) 驱动方式,工业机器人的驱动方式有机械式、电气失、气压和液压等及联合驱动形式。表50-19列举了各种驱动方式的特点。
5) 控制方式。表50-20列举了各种电控系统的特点。
2. 固定式机器人。
50-19各种驱动方式的特点
|
比较内容 |
驱动方式 |
|
机械联动 |
电动机驱动 |
气压驱动 |
液压驱动 |
|
异步、直流电动机 |
步进伺服电动机 |
|
输出力 |
输出力较大 |
输出力较大 |
输出力较小 |
气体压力小,输出力较小 |
液压压力大,可获得较大的输出力 |
|
控制性能 |
速度较高,速度与加速度均由机构控制,定位精度高,可与主机严格同步 |
控制性较差,惯性大,不易精确定位 |
控制性能好,可精确定位,但控制系统复杂 |
可高速,冲击较严重,精确定位困难,气替压缩性大,阻尼效果差第度不易控制 |
油液不可压缩力、流量均易控制,可无级调速,反映灵敏,可实现连续轨迹控制 |
|
体积 |
当自由度多时,机构复杂,体积较大 |
要有减速装置体积较大 |
体积较小 |
体积较大 |
在输出力性同的条件下体积小 |
|
维修使用 |
维修使用方便 |
维修使用方便 |
维修使用较复杂 |
维修简单,能在高温粉尘等恶劣环境中使用,泄漏影响小 |
维修方便,液体对温度变化敏感,油液泄漏。易着火 |
|
应用范围 |
适用自由度少,速度高的专用机械手 |
适用于抓重大速度低的专用机械手 |
可用于程序复杂运动轨迹要求严格的小型通用机械手 |
中小型专用,通用机械手也都有应用 |
中小型专用,通用机械手也都有应用,特别是重型机械手多为液压驱动 |
|
成本 |
结构简单,成本低,一般工厂可以自己制造 |
成本低 |
成本较高 |
结构简单,能源方便,成本低 |
液压元件成本较高,油路也较复杂 |
50-20各种电控系统的特点
|
比较内容 |
控制系统 |
|
固定程序 |
可编程序 |
|
继电器线路 |
半导体逻辑线路 |
顺序控制器 |
示教再现或微型计算机 |
|
动作程序容量 |
动作程序少 |
动作程序可较多 |
动作程序一般为16步,卡扩展32步或更多 |
动作程序较多,通常为200步,可扩展更多 |
|
控制的参数 |
1) 动作程序
2) 动作到达的位置或时间
3) 夹放工件信息
4) 联锁信息
这些信息固定于线路之中不能任意变动 |
1) 动作程序
2) 动作到达的位置
3) 时间信息
4) 工件夹放信息
5) 联锁信息
6) 程序终了信息,着些信息可以任意编排 |
1) 动作程序
2) 动作应到达的位置
3) 工件夹放信息
4) 时间信息
5) 联锁信息
6) 运动速度信息
7) 定位精度信息
8) 程序终了信息。编排程序顺序范围大,可设置各种传感器 |
|
制造与维护 |
制造简单,维护方便、体积较大 |
制造简单,维护方便,体积小 |
一般由专业厂生产供应,需具有一定专业知识人员维护 |
线路复杂,制造、调整均较困难,需专业人员维护 |
|
使用的行程检测单元 |
行程开关,机械挡铁 |
行程开关,机械挡铁 |
行程开关,电位器 |
行程开关,旋转变压器,数码器,光栅等 |
|
使用寿命 |
一般低于继电器 |
寿命较高 |
寿命较高 |
寿命较高 |
|
成本 |
便宜 |
较便宜 |
成本较高 |
成本高 |
|
使用范围 |
用于动作少,速度低的专用机械手 |
用于速度快,节拍短的专用机械手 |
适用一般工业机器人 |
动作多,程序复杂的高级工业机器人使用 |
固定式机器人的本体是固定的,它只能进行臂部可活动范围内的输送作业。所以它作为柔性制造单元内部的搬运设备被广泛应用,虽然在输送距离上受到限制,但是,如果能自动更换手部,它不仅能输送工件,刀具、夹具等各种物料,而且可以装卸工件,具有较高的柔性。
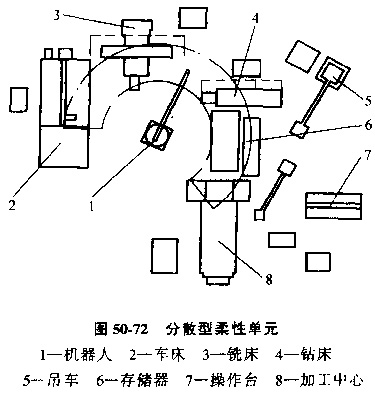
固定式机器人可分成服务于多台机床式和服务于固定机床式两种。图50-72所示是采用一台机器人把工件供给数台机床的示例,着种柔性制造单元是以机器人为核心的系统结构。各台机床的工件装卸位置分布在机器人的可活动范围内,机器人按控制成粗实现各台机床的工件装卸及传递。
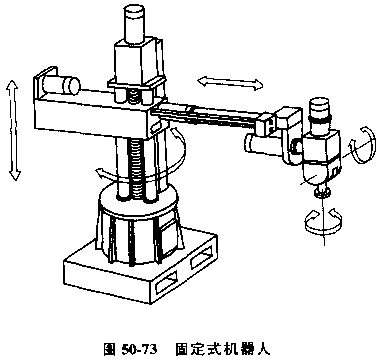
固定机床式是机器人服务于某一台机床,图50-73所示的是将小型机器人组装在机床内,机器人采用圆柱面坐标或球面坐标形式,它具有搬运及装卸工件所需的最低限度的运动自由度,实现工件的上下料及机床各工位间的零件搬运。
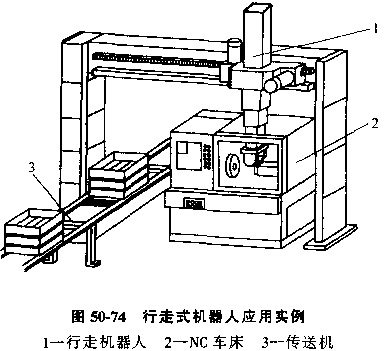
3. 行走式机器人
行走式机器人即移动式机器人,普通自动装卸机处理工件功能的柔性较小,但随着对这些功能柔性要求的提高,将自动装卸机处理工件的功能转变为机器人的臂和手的形态,就形成了行走式机器人。图50-74是行走式机器人的例子。采用了机器人与传送机及运输小车的组合输送方式。
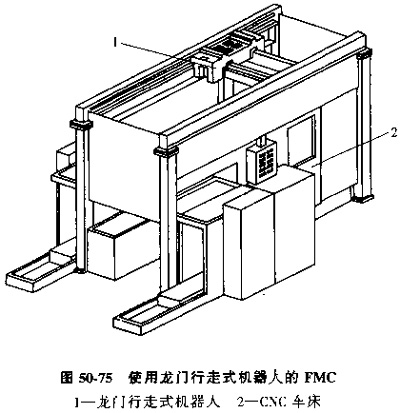
如果将单轨改为两条导轨,则成为桥式起重机,或龙门式起重机,在柔性制造系统中也使用以这些起重机为基础的行走式机器人,图50-75所示的是德国柏林工业大学使用龙门行走式机器人的柔性制造单元,它的手部位可自动交换,不仅对工件,而且对刀具、量规和夹具进行搬运与操作处理。这种龙门行走式机器人结构坚固,可实现高精度定位。
若在柔性制造系统中采用多于一台机器人时,应对其划分区域以免相互碰撞。