3.1�����������ĸնȺ�����
�������������ھ����ܲ����ϴ��Ա��κ��������õĵ���Ԫ������˳��ܲ����������λ���⣬���������������á���������������Ӧ�غɵIJ�����������Ӧ�ýϹ㣬����Ҳ�϶ࡣ�����������Ļ��������������Ҫ����նȺ������йء�
�������ĸնȿɷ�Ϊ����նȡ�����նȺ�Ťת�նȡ������غɱ仯������Ť�ز�����ʽ���֣��ɴ��������Ҳ����Ťת��Ϊ������������������Ҫ�ĸն���Ťת�նȡ�Ťת�ն��ײ�����λŤת���������Ť�ر�ʾ��ͨ�������ڴ�����ϵ����������ĸնȶ��ȵ����������ĸնȴ�öࡣ����Ϊ�˼��������������ĵ��Կ�����ȥ���ơ����������������ԣ���������һ������������ĸն���Ϊ������ϵ�ĸնȡ��նȿ�����ʽ��ʾ��
C=T/

��3-1��
ʽ��T�������������ݵ�Ť�أ�

������Ť�����������������������Ťת�ǡ�
����ϵ�ӽ���������ʱ���ն���Ť����������ı䴫����ϵ�Ĺ���Ƶ������Ƶ��֮��Ĺ�ϵ�����ܱܿ�����
�����������ڴ��ݲ��ȶ�Ť�صĹ����У�����Ԫ���ĵ��Ա�����Ť�صĸı�����������ڱ��εIJ��ȶ����ڵ���Ԫ������˶��ĽӴ������ϲ�����Ħ����ͬʱ�ڵ���Ԫ���ڲ���������Ħ������ЩĦ��������һ���ֶ���ת��Ϊ���ܣ�ʹ�¶����ߡ���������������������á�����������ʵ�ֻ����˥�������������������ܿ���������ϵ����ʾ������ÿһ���غ�ѭ���в����������ܺʹ�����Ťת����Ԫ���еı�����֮�ȣ�����=W
d/W
e�������˶��ַ����У�ճ������ϵ����y����ʾ����������ϵ��֮��Ĺ�ϵΪY=

����Ϊ��Ƶ�ʻ��ƶ����ر仯Ƶ�ʡ�����ϵ��������Ħ�������ĵ������Ͷ࣬��֮������ϵ��С������Ħ�������ĵ��������١�
����������һ�㶼�л���������ܣ����Ǿ���ijһ��ֵ���Ե���������������������ı�Ť�������¶��ܲ��������Ч������ʱ�����������ǿ�ҵ�����ԭ�����ڴ��������ĸնȴ�С���ɼ���ֻ�иնȺ�����������ϵ�������������غ�Э��ʱ�����ܲ�������Ч������ˣ�������ݿ���������ͨ�������������������ĸնȡ�
3.2�������غ������µĶ������Լ���
����ijһ�Ѷ��Ĵ�����ϵ��ת����������Ƶ�ʿ��ɼ�����ã������֪����Ť�صı仯���ɣ��������Ƶ�ʵȣ����ܽ�������ϵ��Ťת��ʽ���˶��ַ��̣��Ը÷�����⣬���ɵõ�������������ĸնȡ�
Ϊ�˱�������˶��ַ��̣���Ҫ�Դ�����ϵ���������������ʹӶ������ת�������ն�����ѧģ�͵ļ����ݾ���ṹ��������Խ���ϵ��Ϊ���ɸ���Чת������Բ�̣��Ծ���ijһ�նȵ�����ϵ������ͨ���Ƚϵ��͵��Ǽ�Ϊ������Ч��Բ�̣������������������ࡣ���趨��������ĸ��Ժܴ�ֻ�����������е��Ժ����ᡣ��ͼ3.1��ʾ
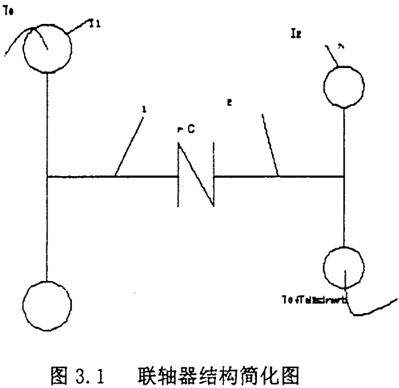
�趨��������Բ��1�Ժ�Ť�ؾ������������Ӷ����ϵ�Բ��2�����ڴӶ�Բ�����а���г���ɱ仯���Ŷ�Ť�ط�������ʱ�����ݶ����ض���������������������ƽ�����������Էֱ��г���Բ�̵�ת���˶�����ʽ����ϵͳŤ����ַ���Ϊ��

��3-2��

��3-3��
ʽ��

��

�������Ӷ�Բ�̵�ת��
--��Բ�̵����Ťת��
I1,I2���������Ӷ�����Բ�̵ĵ�Чת������

��

���������Ӷ���Ľ��ٶ�

��

���������Ӷ���ĽǼ��ٶ�
C�����������ĸն�
r����������ճ������ϵ��
Td2sin��t�����Ӷ���Բ���ϵ��Ŷ�Ť��
������ʽ�ϲ��õ����׳�ϵ�����Է�����ַ���
��ʽ�Ľ�����������ɣ�����Ӧ����η��̵�ͨ��ͱ����̵��ؽ⡣�������ɵõ����������ܵ�г��Ť��Ϊ��
��sin����t+a��=lʱ����ʾг��Ť�شﵽ���ֵ��
����ʽ��֪������������������У���������������Ť�ص��������Ҫ�붯���Ŵ�ϵ����ת�������йء����Ŷ�Ť������һ���ת������������һ���ת������ʱ�����Լ�С��Ť�ص��������֮���Լ�С��Ť����������ò������Ŵ�ϵ������Ť�������Ӱ��������ϵ�����Ŷ�Ť�صı仯Ƶ�ʼ���ϵ����Ƶ�ʵı�ֵ���йء�������ϵ��һ��ʱ����Ť�ص����������ϵ�Ĺ���Ƶ���йأ������������ĸն��йء�
���·ּ��ֲ�ͬ���Ŷ�Ť�ر仯Ƶ������ϵ����Ƶ�ʵı�ֵ����������Ť����Ӱ�졣Ϊ�˼���������������ϵ������

������㡣
(l����

=0,��

�������Ŵ�ϵ��K
d�ܴ���1��
���ʾ������������Ť��û�зŴ�ǰһ������൱��û���Ŷ�Ť�أ����߿���Ϊ��ϵ�Ĺ���Ƶ��Ϊ����������Ϊ���Ը����壬��ն�C����һ�������ʾ����������һ���ĸնȣ���ϵ�Ĺ���Ƶ�����Ŷ�Ť�صı仯Ƶ�ʵı�ֵ�պ�Ϊ

��
(2����0��

��

ʱ�������Ŵ�ϵ��K
d�ܴ���1��
��ʾ�ڸ��Ŷ�Ť�صı仯Ƶ���£��������ĸնȻ�̫�����Բ�����������������ã�����ʹ�����������ݵ���Ť��������

����K
d=��,���������������������Ť�ص�����ﵽ����Ҳ����˵����ϵ����Ťת����ʱ����������ڣ������Ŵ�ϵ��ΪK
d=
������ʹŤת���������������ͨ��

���Ǵ���1����˼�ʹ�����ᣬŤ���Ǵ��ڣ�����Դ���ϵͳ��Ӱ��̶ȣ���ȫȡ������ϵ���Ĵ�С��
(3����

��
ʱ�������Ŵ�ϵ��K
d��1��
��ʾֻ���ڹ���Ƶ��Ϊ�Ŷ�Ť�صı仯Ƶ�ʵ���ʱ���������������������Ч����Ƶ�ʱ�ֵ
>>
���⼴���øնȺ�С�ĵ��������������������Ŵ�ϵ���ɽ�����Сֵ����Լ����Ч����ã�����ȴ���ֽ������������ij��������������ֵ���ִ�ʱ��Ҳ�п�����ϸ�һ�Ĺ���Ƶ�ʽӽ����Ի���������ˣ��������ĸն�Ҳ���˹���С��
3.3����غ������µĶ�������
��е�����ܵ������Ե��Ŷ�Ť�����ö�������ϵ��Ҳ���ܷ������Ե��Ŷ�Ť�����ö�������ϵ�������г���غ��������ϵ���������е�ϣ��Ƚϳ������dz��ʽ���õı��غɡ����ڴӶ����������г�������غɵ��������ǰ��������ƣ��Կ�ͨ�����ݳ���غ������г����˶����̣��õ��ڳ�������غ������µ�������ϵͳ���г���غɲ�����Ťת��Ϊ��
��ʽ������ϵ�г���غ�����ʱ����������������Ť�صĴ�С������ת�������й��⣬�������غ����õ�ʱ�䳤���йء�����Ϊ������غ�����ʱ��ij����̵����������
1.����غ�ͻȻ���ú��ڳ�ʱ���ڱ��ֲ��䣬�����ij��ط�ʽ�൱�ڻ�е�ȿ�����Ȼ�������������¹�������ʱ�����������ݵ���Ť��Ϊ
T
1=T
0+

T
d2��1-cosft�� ��3-9��
ʽ��T
0�����������ݵ��ȶ�Ť�أ�T
d2��ʾ�����ڴӶ����ϵij��Ť�أ���t=

ʱ�������������ݵ�Ť�شﵽ���ֵ��
��ʽ����������������Ť��һ�����ϵ�ת��������С�������������ݵ�Ť�ؽӽ��ڳ��Ť�ص�2������������������TΪ��
�ڳ���غ������£��������ĵ��Ըߵͣ��Գ���غ����𣬾��������������Ť�صķ�ֵ����Ӱ�졣ֻ�Ǹı������ڵij��̡��������ĵ������ߣ�����Ƶ�����ͣ������������ݵ�Ť�شﵽ���ֵ��ʱ�����������ˣ��������ĵ��ԶԸ��ƴ���Ť�ص�ƽ����������Ӱ�����������ݵ�Ť�����ֵ������֮һ����������������ת�������ı�ֵ��������غ�����һ����ϵ��ת������������һ����ϵ��ת������ʱ�����ܼ�С�����������ݵ���Ť��ֵ�����⣬����������������ʱ����������������һ���ֳ��������Ҳ�ɼ�С���Ť�ء�
2.����غ�ͻȻ���Ӻ�ֻ����һ�ν϶̵�ʱ��t���ͻָ�����ֵ��������غɳ������õ�ʱ��t
1��
��������ʱ����ڻ���ڹ���Ƶ��
�����ڵ�һ��ʱ�������������ݵ�Ť����Ȼ��ʱ��ﵽ���ֵ����ˣ����ֶ�ʱ�ܳ���غ������غ����Ӻ��ڽϳ�ʱ���ڱ��ֲ�������һ������0��t<t
1��һʱ���ڣ������������ݵ�Ť�أ�����������ʱ���Կ��ã�3-1�����㡣ֻ�е�����غ�����ʱ��t
1<
����������ͻȻ�Ķ�ʱ���ܳ���غɡ���ʱ�����������ݵ���Ť���Կɰ����������ó��йؼ���ʽ��
��ʱ������ΪO��t��t1ʱ��������غɿ�ʼ��������ʧʱ��ʱ�䣩�ɳ���غ���������������������Ťת��Ϊ��
���루3-9����ͬ������t��t1,���ڳ���غ���ʧ֮���ijһʱ�̣�������ʽת����
������ʽ��
�����غ�������������������Ťת�ǣ�
��ʽ��3-10����֪���ڶ�ʱ����غ������£����������ݵ����Ť����t1��f֮��Ĺ�ϵ���䡣����
�ɴ˿ɼ������ų���غ�����ʱ������̣������������ݵ����Ť��Ҳ���ż�С�������ڳ���غ�����ʱ����ͬ�������£�ֻҪ��ѡ�������ĵ����൱��ʹ����ϵ�Ĺ�����Ƶ�ʽ����Դﵽ����

> t
1������ʹ�����������ݵ����䶯Ť��С�ڳ��Ť�ء������������г���غ�����ʱ��ѡ����е��Ե����������ܹ��������á���Ҫ��ߵĵ��ԣ��������غɳ������õ�ʱ�䡢��ϵ��ת���������йء�һ���������ij������������ŵ��Ե����Ӷ����͡���ˣ����ڴ��͵ĺ���Ҫ���϶�����������������������ѡ��������������ߴ���������мӴӶ���������ɱ���������ϵ�ĸ����غɡ�Ϊ�ˣ�������غ����ô�������ʱ�����Բ��ð�ȫ��������������þ��нϸ�����ĵ�����������
3.4������ʱ���˶�����̬����
ʵ���Ͽ��Խ������з�Ϊ��̬�����к���̬���������������������̬��������Ҫ��ָ�����������ڰ�װ�����ɵĶ��в�������̬������ָ�����������й����������¶ȵ�������ɵIJ����С�����Ҫԭ���У�ת�Ӹ��㲿�����Ȳ�����ʹ���������������ͱ��κ�Ť�����Σ�������������ʱ���ڱ����Ħ�����������ĥ�������������б�Ͳ��У�����ת�ӵ����Ժ��������䲻���ȣ�ת���ڰ�װ֮�����ԭʼ����������Ӱ����������
3.4.1������ʱ���˶�����
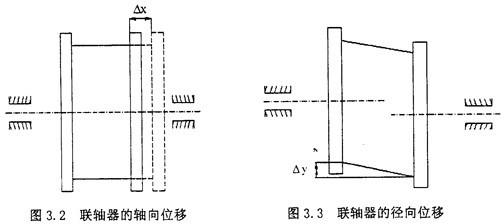
��1����ת�����ߴ��������λ��ʱ����ͼ3.2��������λ��ֻ��������ӵ�����Ӧ����������Ӱ��ת�ӵ��˶��ԡ��������ﲻ���м��㡣
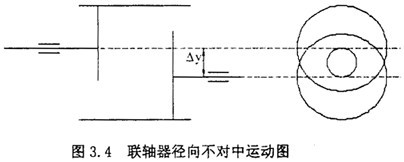
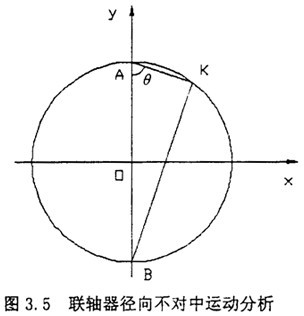
��2����ת������֮����ھ���λ��ʱ����ͼ3.3��ʾ�������������м��׳��������������ƶ������������ת���������м��׳����������������Ի�������ƽ��Բ���˶������м��׳ݵ������������Ծ���λ�ơ�yΪֱ����Բ���˶�����ͼ3.4��ʾ��
��AΪ����ת�ӵ�����ͶӰ��BΪ�Ӷ�ת�ӵ�����ͶӰ��KΪ���ij������ģ���ô��AK�ABK����AB����ΪD��K�������ΪK��x��y����ȡ��Ϊ�Ա�������ͼ3.5��ʾ������
��K�����ٶ�Ϊ
�����м��׳�ƽ���˶��Ľ��ٶȵ���ת��Ľ��ٶȣ���

=�أ�����K����Բ�������˶����ٶ�Ϊ
����ʽ��֪��K���ת��Ϊת��ת���Ľ��ٶȵ���������˵�ת�Ӹ����˶�ʱ���ͻ�����ܴ��������������ת�Ӳ�������������Ƶ��Ϊת�ӹ�Ƶ��������
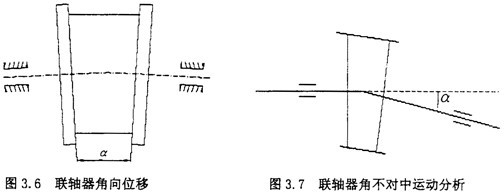
��3����ת������֮�����ƫ��λ��ʱ����ͼ3.6�����Ӷ�ת�ӵĽ��ٶ�������ת�ӽ��ٶ��Dz�ͬ�ģ��Ӷ�ת�ӵĽ��ٶ�Ϊ
ʽ�Ц�1����2��������Ϊ����ת�ӺʹӶ�ת�ӵĽ��ٶ�
a�����Ӷ�ת�ӵ�ƫб��
��1��������ת�ӵ�ת��
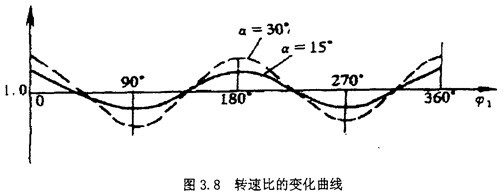
������ת�ӵĻ�ת���ٶ�Ϊ����ʱ���Ӷ�ת�ӵĽ��ٶ���ƫ�Ǻ�����ת��ת�ǵĺ����������
1=0
0��180
0ʱ����
2�����
2=90
0��270
0ʱ����
2��С����ת�ٱȱ仯������ͼ3.8��ʾ�����Ц�
1cosa�ܦ�
2��

�ɴ˿�֪����������������ת�����߷���ƫ��λ��ʱ���䴫���Ȳ�����ת��ÿתһ�ܱ䶯���Σ�������䶯�ķ�����ƫ�ǵ����Ӷ���������Ӷ�ת�����ڴ����ȱ仯�������ĽǼ��ٶȼ���ת�Ӷ��������侶����Ƶ��ҲΪת�ӹ�Ƶ��������
(4��ʵ����ת��е��ת��������������ƽ�в����У�����ƫ�Dz����У���Ϊ����������ۺϣ����ת�ӷ���������Ƶ�������������ۺϵĽ�����侶����Ƶ��Ϊת�ӹ�Ƶ��������
3.4.2������ʱ�Ķ�̬����
��������˶�������֪��������ʱ�����������˶�������Ժ��ԡ����Զ�̬���Է���Ҳֻ����ƽ�в����С�ƫ�Dz������Լ�ƽ��ƫ�Dz��������������
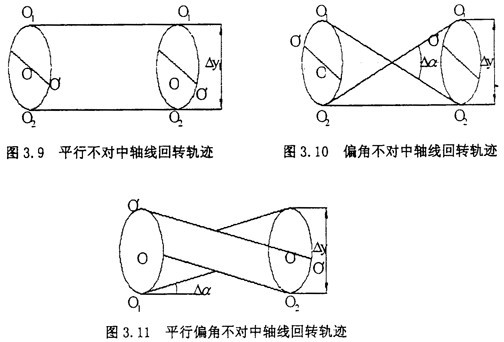
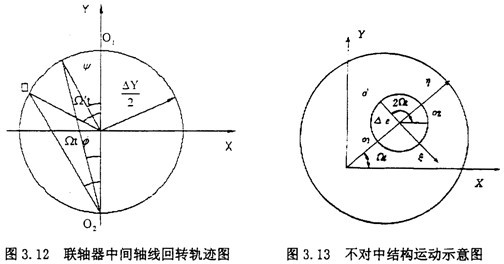
���������ӵ���ת������֮�䷢�������й���ʱ����ƽ��λ�ƻ�Ƕ�λ�ƣ����˶����ݹ����У��������м�����˶�����ͬʱ������������������Ҫ�����м����������ƽ���˶����������ߵĻ�ת�˶�Ƶ����ת�ӵ�����Ƶ�ʲ�һ�¡�������ƽ�в����С�ƫ�Dz����к�ƽ��ƫ�Dz������������ʱ���������м��������ת�켣�ֱ�Ϊͼ��ͼ��ʾ��Բ���塢˫��Ͱ�˫�塣����Щͼ�У�O1��O2Ϊ���������������ģ�O��O��Ϊ�������м��׳ݵľ�̬�Ͷ�̬��ת���ģ���y����a�ֱ�Ϊת��ϵͳ��ƽ�к�ƫ�Dz���������
��������ͼ����ʾ����������������ת�����Ľ���ͼΪһ�ܣ���ͼ3.12��ʾ��O����˶��켣��������Ϊ
X=��Esin������t-���� ��3-24��
ʽ�Ц�����ת�ӵĻ�ת��Ƶ��
��E��������������������E=

��ƽ�в�����ʱ����
��E=

��ƫ�Dz�����ʱ��
��������ʼ��λ�ǣ���=2�棨ƽ�в�����ʱ����
��=2�棨ƫ�Dz�����ʱ��ˣ�����=2��-

��ƫ�Dz�����ʱ�Ҷˣ��м��׳ݶ�ת��ϵͳʩ�ӵļ�����Ϊ
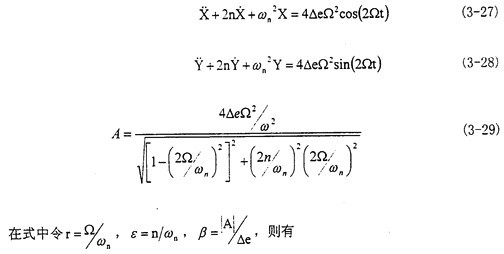
Fx=4M��E��2sin����t-�棩��Fy=4M��E��2cos2����t-�棩 ��3-24��
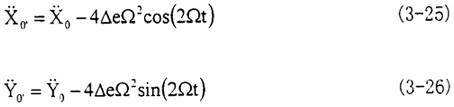
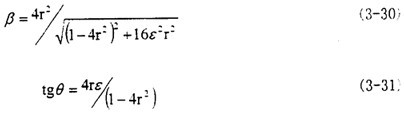
����״̬���������Ķ�̬������ͼ3.13��ʾ������������������ΪO1��O2����������ǵĶ�̬����ΪO�䣬��ϵͳ�Ԧ�ת��ʱ��������ĵļ��ٶ���
���С�e=OO��Ϊϵͳ����������������ת��ĵ������������£��������˶�������m 0=-kX��m 0-kY�����ǵ�������������
���ڶԽ���������ۣ�
(1����r������Oʱ�������Ŵ�ϵ��M������O����������O���������ϵͳ��ת�ٽϵ�ʱ������Ӧ�����С�����н�С����λ�ǡ�
(2����r=1/2ʱ��ϵͳ��������ϵͳ����������ֵ����ֵ�Ĵ�Сֻ������ϵ���йأ����ͬʱ����λ��Ϊ

��
(3����r�����ڡ�ʱ�������Ŵ�ϵ��M����ȥ1���������ϵͳ��ת�ٽϸ�ʱ������Ӧ��������ȶ�����������漤������Ѹ�����Ӷ��Ӵ����ͬʱ����λ�Ǧ������ڦУ��������ȶ���
3.5������
����ͨ�������������ĸնȺ����ᣬ�����˵������������������غ������غɶ��Ķ������ԡ��ڵ��Ľ������ط�����ƽ�в����У�ƫ�Dz������Լ�ƽ��ƫ�Dz����е��˶��붯�����ԡ�
�Ӹ��ֲ����е��˶�ѧ�Ͷ���ѧ�������Եó����½��ۣ�
(1�����������벻�����������ȣ��治�����������ӣ��������������ԼӴ�
(2���ڲ���������£��м�Բ������о��������������������߲�������˶������У�ƽ�в����еĻ�ת����ΪһԲ���壬ƫ�Dz�����ʱΪһ˫�壬ƽ��ƫ�Dz�����ʱΪ��˫�塣��ת��ķ�Χ�ɲ�������������
(3�����������ڹ���״̬ʱ����������һ�ֲ�������ʽ��ϵͳ����Ӧ��ת�ٴﵽ�ٽ�ת�ٵ�һ��ʱ������������������ֵ��ͬʱ����λ��Ϊ

(4��ϵͳ��ת�ٴ����ٽ�ת�ٺ���ת�ٵ����ӣ�����Ӧ��������ȶ��������漤������Ѹ�����Ӷ�����