�Ƚ�����������������
2.1����
�Ƚ������������������ķ�����Ӧ�ÿ����������������Ŀ�����Ӧ�õ�ո��ʱ������Ҳ�������������Ƚ����˶��Ļ�������ꡣ�����Ĵ�����ζ���п��ܷ��������͵ĵȽ����������������о������ش����������������Ƚ��ٴ����������о����Ҳ��Ϊ������һ����Ҫ���о����⡣
ʵ�ֵȽ��ٴ����������ж�����ʽ�ɿ����ø߸�����Ҳ�����õ�������������������ö������Ҳ�����õ�һ����������������Ҳ�����ù��ӻ�������״�Ĺ���������������Щ��ͬ����ʽ��ͨ�����ݻ��ͻ��������ġ�ǧ���ĵȽ��ٻ�������Ҳ�ǵȽ������۸��ӵ�ԭ�����ڡ�
���´ӵȽ��ٻ�ת���˻������֣���ʵ�ʵļ��ֵ��͵Ƚ��ٲ�ƷΪ�����Բ�ͬ�ĵȽ������۽��������Ƶ����������ۺϣ����������Dz�ͬ�����÷�Χ��Ϊ���͵Ƚ��������������ķ����ṩ��Ҫ�����ۻ�����
2.2�Ƚ��ٻ�ת���˻���̽��
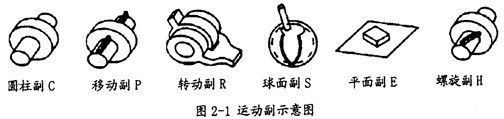
�ڵȽ��������������У��ֶ��������˻���������ϵ�˫��ʮ�������������������������������˻������Ӵ����IJ�ͬ�Ļ����ۺ��У��п��ܵó�����ʵ�õĵȽ������˻����������о��Ƚ������ۣ������˻�������ʽ�ͳ߶ȹ�ϵΪ�������µĵȽ������۵�̽������һ�����������ǿ��еġ��ڻ���ѧ�ϣ�����ͬ����������ӳ�Ϊ�����䲻ͬ����ʽ�ʹ�����ͼ2-1��ʾ��
2.2.1�Ƚ��ٻ�ת���˻���
�Ƚ��ٻ�ת���˻�������������λ�����ĵȽ��ٴ��������ཻ�ᡢ�����ᣨinterlaced shaft����ƽ���ᡣ����ֻ�����ȣ���һ����й������������졢�������ȸߡ���ĥ����ŵ㡣���ѱ��㷺Ӧ�������������ֻ����豸��˫��ʮ����������������ʮ�ֻ����������Ȼ��������������
�Ƚ��ٻ�ת���˻������Ϊ�ռ�����������Ϸ��ѣ���߶�Լ����ϵʽ�ϸ��ӡ��������о���ֻ�ܴ�ijЩ�������֣�Ŀǰ�ҹ��е�ѧ�����û����Ļ�ת�����Ƚ�������Ϊ�����㣬���û���ѧ�����ݻ����˶������ӵȷ����ó��˶��־��еȽ������ԵĻ����������ۺͷ������£�
�������ۣ�
��һ����������תʱ��λ��ʼ�վ������ύ�ǣ�������������֮��ļнǣ��Ľ�ƽ����Ϊ����ĶԳ��ԣ���û��������еȽ����ԡ���Ȼ���˶����빹�����Գ������������Һ����м丱�ĵ����ɶȾ����������������Ļ�����ʽ�����˶������ǣ��м��˶���ʼ���ھ�������ƽ���˶�����һ����ֱ�۵ز�����һ���ཻ�ᡢ������Ƚ������˻����Ļ�����ʽ��
����������м��˶���Ӧʼ���������ڵ�ƽ���˶����ɼ��빹���м��˶������������ֱ��뾵�湹�ɼ���ƽ�渱���γ��������Գ��ھ���ļ���������ƴ˼������Ϊ���������������������
���õķ�����
���������ĵ����ɶȾ�����������ˡ�������������������ĸ���������һ���ཻ�ᡢ������Ƚ��ٴ������˻����Ĺ�����ʽ���Ӷ���ͨ��ʮ�ַ��ѵĵȽ��ٶ�˿ռ�����߶ȹ�ϵ���о�����Ϊ������������������������������������о���Ӧ�þ���ƽ�ⷨ������⣬���ó����ǵ��������ڵ�������Ҳ�͵õ��˴˻����Ƚ��ٻ�ת�ij߶�Լ����ϵʽ��
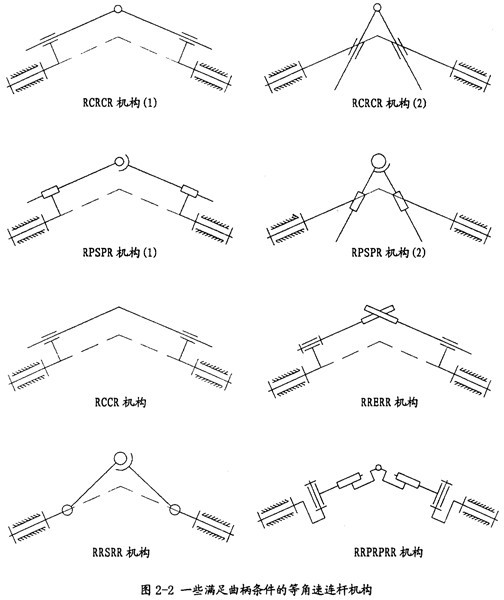
ͨ�������ķ��������Եõ��ཻ�ᡢ��������ʽ�Ķ��ֵȽ������˻�������ͼ2-2���г������е�һ���֣����Ƕ����ཻ�ᴫ������ʽ����Ȼȫ���Ǿ������������Щ�������е��ѱ�Ӧ���ڵȽ����������ϣ����������ʽ����������������RPSPR����Ϊ��������ͼ2-3���г������е�һ�ֽ���Ҫ�Ľ�������ʽ�ĵȽ������˻�����
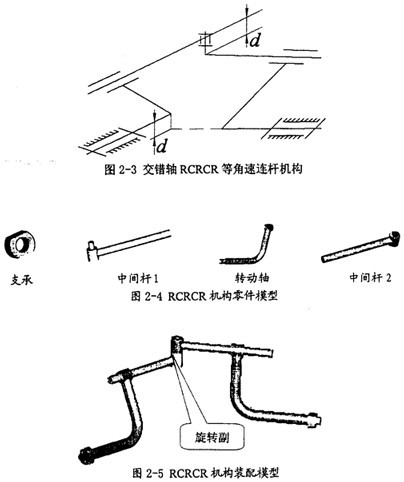
��ͼ2-3��ʾ��RCRCR���潻����Ƚ������˻����У�Ҫ��֤���ֻ�������˫������������������������ͼ����ʾ�ĺ�ɫ�ߴ�ֵd���ֻ�����е�һ��������һԼ����ϵ���Ϳ��Կ������ڵȽ��ٻ�����Ҫʵ�ֻ����ĵȽ������ܣ�������Ҫ�����е�и�������������״�ߴ磬����ҲҪ���㹹�������ռ�λ�ù�ϵ������ͼ2-3����ʾ�Ŀռ�λ�ñ��ﲻ�������ػ���������װ��ģ��ͼ�ͻ����ĸ����ģ��ͼ���ֱ���ͼ2-4��ͼ2-5��ʾ��
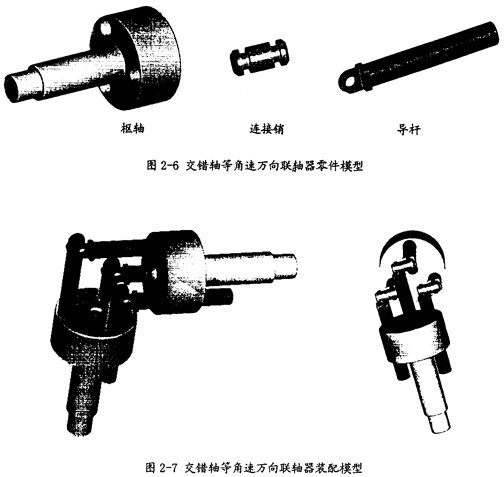
����ͼ2-5�еĻ�����ʽ�������ڿռ��н�����չ�����ɵõ�һ�ַdz��м�ֵ�ĵȽ�����������������RCRCR������Ƚ�����������������ͼ2-6ʾ���˴�����������������ģ�ͣ���ͼ2-7��ʾ���˴�����������װ��ģ�ͣ�����������ͼ�ֱ��ǴӲ�ͬ���ӽǵõ�����ͼ�������������ڹ�������ʵ�ֿռ佻���ᴫ����������Ҫ�ص��ǣ����ṹ����ĥ���Ժã�������״���������죻���������ӵ����������ƫ�ƽDZ䶯��Χ����������ֱ�ǽ��������������ǹ��������ʱ����
2.2.2�Ƚ������˻�������֤
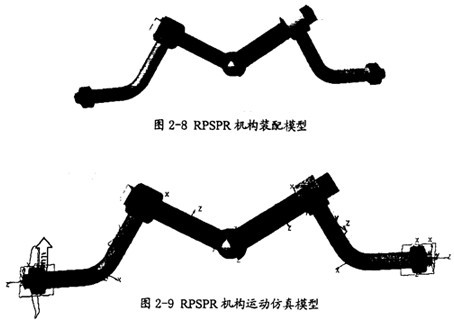
�������������ھ�������������е������ǵȽ��ٶȻ������Ļ����ϣ���������������õ������Ƚ����˶��ij߿�Լ����ϵʽ��Ϊ����֤��һ�����Ŀ����ԣ���������������RPSPRƽ���ཻ��ģ�ͣ���ͼ2-8��ʾ�������ģ�͵Ľṹ����δ��ȫ�Գƣ������ƶ��������渱�ľ��벻ͬ����
2.2.2.1����ģ�͵Ľ���
��ͼ2-8��ʾģ�͵Ļ����ϣ�ͨ���ڸ�����������˶��������˶�����ʩ���˶����������ɵõ��˻������˶�����ģ�ͣ���ͼ2-9��ʾ�����ڴ�ģ�͵Ľ����������ϸ�֤�������Ĺ��棬���˶�������ʽͬͼ2-2�е�RPSPR��������ͬ�������ڴ�ģ������4���������������ܣ�����2����ת������2���ƶ�������l�����渱��ģ����l�����ɶȣ��ټ���l���˶��������ɵõ������ķ���ģ�͡�������ģ�Ͳ������㾵�������������
2.2.2.2����������
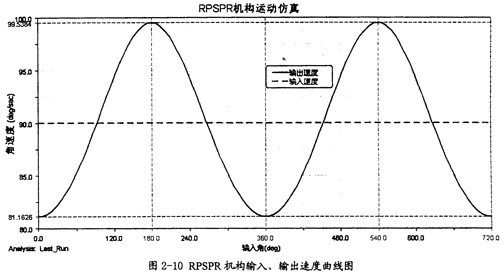
��ģ�ͽ����˶�����������������ģ�͵������������ٶȵIJ������ߣ���ͼ2-10��ʾ����
�ڴ˷����й�����˴�ģ���˶����ܵ����ߣ���֤����ģ����˫�����϶����ڣ���ǰ������ۣ���������Ǿ��������������ת�ٺ㶨������£������ת�پ��Ǻ㶨�ģ���ͼ2-10�У�������ת�ٺ㶨Ϊ90��/sʱ�������ת�������ڱ仯�ġ�������ģ���ģ���ԭģ��Ϊ��ȫ�Գƽṹ�����㾵����������������½��з��棬�ó��Ľ��������ת��ͬ���ת����ȫ��ȡ������������˵����ǰ�����۵���ȷ�ԣ�ͬʱҲ˵��Ҫ��õ��Ƚ��ٴ���������һ�����¡���������֤��ֻ�Ƕ�һ����ʽ�������ԣ��й������Ļ�����ʽ������Ҫ��һ����̽����
2.2.3�Ƚ��ٻ�ת���˻�������
������ķ�����֪�����ڷǾ���ԳƵ�RPSPR�����������ܾ��еȽ��ٻ�ת�����ԡ�
���еĻ����У����˻�����ռһ���֣���������ֽ�ռ���˻�����һ���֣���ʹ����֤�����������۵���ȷ�ԣ����о�������Ҳ��ռ���������ĺ�С��һ���֣��ⷽ������ۻ��ܲ����ƣ���Ҫ��һ�����о���
2.3�Ƚ������������������ۼ���Ʒ
���ڵȽ���������������Ŀǰ���γ����������ۣ��ʹ�������ز�Ʒ���Ѵ����ĵȽ����������ĵȽ��ٴ����������£�
˫ʮ��������������ʵ�ֵȽ��ٴ��������ۣ�
������λ�����ύ��ƽ�����ڵĵȽ��ٴ������ۣ�����ʽ���ۣ���
˲ʱ��������ת�������ۣ��Ƕ���ʽ���ۣ���
2.3.1˫��ʮ����Ƚ��ٴ������ۼ����Ʒ
2.3.1.1˫��ʮ����Ƚ��ٴ�������
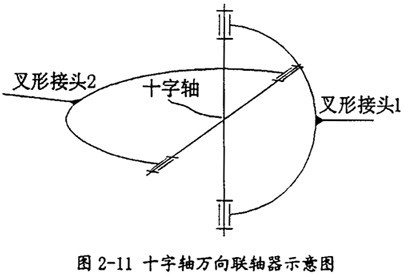
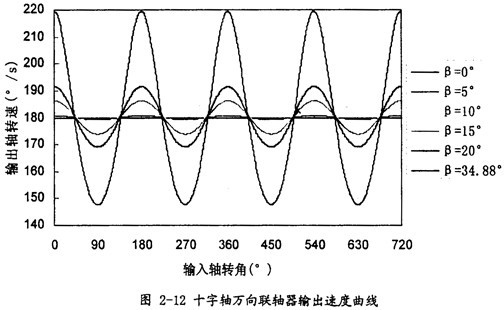
ʮ���������������Ļ����ṹ��ͼ2-11��ʾ�����������������ϵIJ��ν�ͷ1��2��һ��ʮ������ɣ���Ϊ���ν�ͷ��ʮ�����ǽ½ӵģ�������������������нϴ�Ľ�ƫб���������ͬһ������ʱ������������˶����Ӷ��Ὣ��ijһ��Χ�������ڵı����˶��������ͬ����
�����������������˶���ϵ��
ʮ���������������Ļ���ʵ���������������˻��������Ŀռ��˶���ϵ���ѽ������������롢��������ߵļн�Ϊ��������ת�ǧ�
iת�٦�
i�������ת�ǧ�
o��ת�٦�
o�������ǵ�λ�ƹ�ϵʽΪ��tg��
i=tg��
pcos�£��ٶȹ�ϵʽΪ��

������ͼ��ͼ2-12����ͼ��Ŀ����Ҫ��Ϊ�˺������֤��ʾ��
˫��ʮ���������������Ƚ��ٴ���ԭ����
�ּ���������ʮ������������������ͼ2-13��ͼ2-14������һ��������ͬ�Ӷ������м���֮��ļнǷֱ�Ϊa
l��a
2����������ת����
1�ǣ��м���ת����
0�ǣ��Ӷ���ת����
2�ǣ����������λ�ƹ�ϵ��������ʽ�ӣ�
�Ե�һ�������������У�tg��
0=tg��
1cosa
1�Եڶ��������������У�tg��
0=tg��
2cosa
2���ǿɵã�tg

cosa
1 =tg

cosa
2����Ҫ�Ƚ��٣�����

=

����a
1= a
2�����͵õ���˫��ʮ���������������Ƚ��ٴ���ʱ�����ֿռ䲼����ʽ��Ҳ����ͼ2-13��ͼ2-14��ʾ�����ַ�ʽ��
��˫��ʮ���������������������ֲ�����ʽ���������������£�
������ʮ�����������������ʹ�ã����п���ʵ�ֵ��ٴ�����ֻ����������������
�����ᡢ������ʹӶ�������Ӧ��ͬһƽ���ڣ�
���������˲��ν�ͷ�IJ��Ӧλ��ͬһƽ���ڣ�
�������������Ӷ���֮�������Ӧ��ȡ�
��Ҳ��˫��ʮ���������������Ƚ��ٴ�����ԭ��������һ���ۿ�֪������������һ�־�����������ϵ����ۣ�ֻ�����ʮ����������������������÷�Χ��խ��
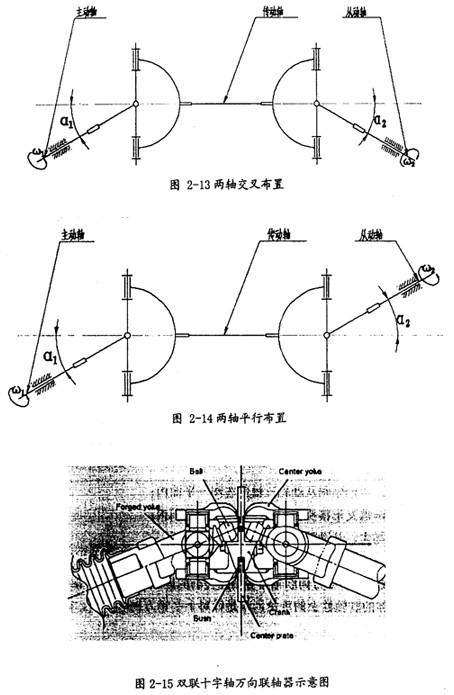
������������ָ���£�����������ͼ2-15��ʾ��˫��ʮ����Ƚ������������������Ĺؼ��ṹ�����м�������������֤������ͬ��൱���м��ᣩ�ļн�ʼ����ȣ��Ӷ�ʵ�ֵȽ��ٴ�����
2.3.1.2˫��������Ƚ��ٴ������۵IJ�Ʒ
2.3.1.2.1����ʽ����������
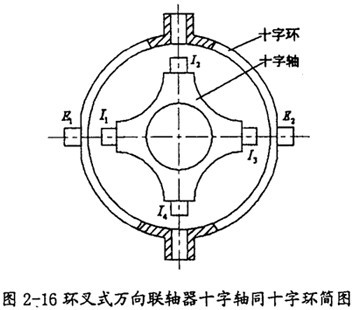
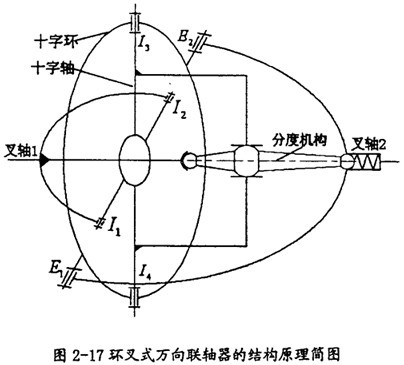
��˫��ʮ����Ƚ����������������۵�ָ���£����ǽ��м�Ĵ���������Ϊ�㣬������ʮ������Ӧ��Ϊʮ�����ʮ�ֻ��Ľṹ����ͼ2-16��ʾ�������ǾͲ����˻���ʽ�Ƚ�����������������ṹԭ����ͼ��ͼ2-17��ʾ��
����ʽ�����������Ľṹԭ����
����ʽ��������������˫��ʽ�����������Ļ����Ϸ�չ���ɵġ�ȡ���м��ᣬʹ�����˵�ʮ�����ڼ������غ�Ϊһ�����棬�Ӷ���֤�������ϵĵ��ٴ�����Ϊ������ʮ�����ص�ʱ����ʵ�巢�����棬������һ��ʮ����ʵ���Ϊ����һһ����Ϊһ���пյ�Բ������Ϊ��ʮ�ֻ�����ʮ�ֻ��Ͽ��������������ഹֱ�����Ͷ����ᣬʵ���Ϲ�������ʮ���ᣬͬ����ʮ�������ã�ʹ�����ʵ������ʮ�����ڼ��������ص�Ϊһ��ƽ�档�����������������С������͡��桱�Ľṹ������������ʽ�������������ɴ˵�����
������ʽ��������������ת��ʱ��ת���ɲ���l�������棩����ʮ���ᣬ�ٴ���ʮ�ֻ�������2���Ӷ��棩���˻�����߱��������ݹ��ܣ���Ҫ�����������˶����ԣ���������һ�ֶ�װ�ã�Ϊ�˽�����ʽ�����������ĸܸ�ʽ�ֶȻ������õ�����ʽ������������������ʹﵽ��������������������˶�ƽ���������Ӷ���Ľ�ƽ����ĵ��ٴ���������
����ʽ�������������ص㣺
a.��̬���������Խ�������ʽ������������
b.������нǡ����ת�Dz���ﵽ������ʽ������������ˮƽ��
c.����������ʹ���������ӹ����ȵ�ͬ�ڴ�ͳ��˫��ʮ����������������ͬʱ����ʮ���������������������ŵ㣬�磺�ӹ��������ס��ɱ��������۸���˵ȵȣ�
d.�ṹ���գ�������ǰ�������γ��ṹ���õ�Ҫ���й�����Ӧ��ǰ����
�ֶȻ�������
����ʽ����������ʵ��������˫��ʮ���������������ӵ�������ʽ�����������ķֶȻ�������ɡ�����ʽ����������ͬ��������ʽ�����������ĵȽ��ٴ������Եĺû��ؼ������ɷֶȻ������������������ԷֶȻ������ܵ������������ȫ�������ص�ʮ�������塣
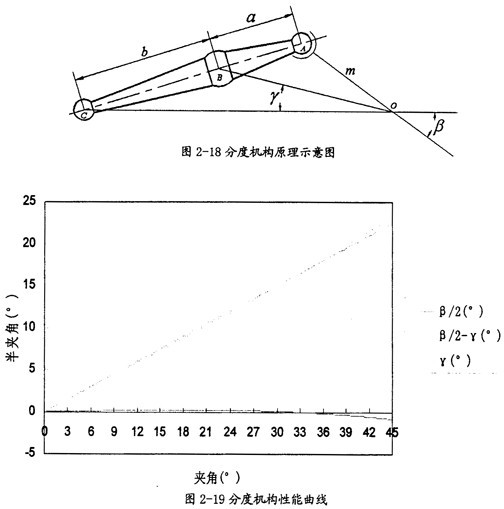
�ڻ���ʽ�����������в��õķֶȻ����IJ�����ʽ��ͼ2-17�к�ɫ���֡�������1��Բ���2��ƫתʱ���ֶȻ�����������ͷ�ֱ�������ǵ���Ϲ���ת���������ͻ����ʮ�����ʮ�ֻ�ƫתһ���ĽǶȡ��������еĵȽ��ٴ������ۣ���ʮ�����ʮ�ֻ�ƫת�ĽǶ�Ϊ����1��Բ���2ƫת�ǵ�һ��ʱ�������ʮ�����ʮ�ֻ�ƫת������l��Բ���2�ĵȷֽ�ƽ�棬����������ͻ��ڵȷֽ�ƽ���ڣ��Ӷ�ʵ�ֵȽ��ٴ�������ô���ڵĹؼ������ǷֶȻ����Ƿ������ý��Ƕ�ƫתһ�롣�����ֶȻ�����ԭ����ͼ��ͼ2-18��ʾ�������и������Ĺ�ϵ����ʽ��
m=18mm��a=9.7mm��b=27.7mm����ֵ��ѡȡ�Ѿ����Ż���
�������ֶȻ��������۰�ƫת��

��ʵ�ʰ�ƫת�ǧ�����ǵIJ�ĺ���ͼ�Σ���ͼ2-19��ʾ��
��ͼ2-19�У����Կ�����

��y�ĺ���ͼ�Σ��ڦ½�С��36����ǰ���������ص��ģ���36���Ժſ�ʼ�����ԵIJ��죬��һ������ǵIJ�ֵ���ߣ�ͼ2-19��������Ϻ�ɫ���ߣ�Ҳ���Կ����������˵���˻�����Ŀǰ�ij߶�����36����ǰ�����ķֶ��������൱����ģ�ֵ�ý���������ӷֶ����������ϣ����Կ���������ʽ������������������ȫ�ĵȽ�����������������Ϊ��36����ǰ�ķֶ�Ҳ��С�IJ��졣
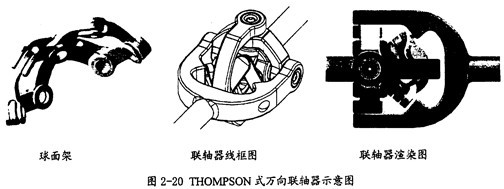
2.3.1.2.2 THOMPSON ʽ����������
������ʽ�������������м�ֱ�߷ֶȸ�ת��Ϊ����ֶȻ������ͳ�Ϊһ�����͵ĵȽ��������������������THOMPSONʽ������������ṹ��ͼ2-20��ʾ��
������������ͨ��������ܣ�ͼ2-20��ߣ����ֶȣ���Ի���ʽ������������˵���ṹ���Ǹ����ˣ�����������ʽ�ֶ��еĸ߸�ȫ��Ϊ�˵��������ϻ�dz������������ͻ�����ߡ�������Ľṹ�Ͽ������ָı��������װ���ϲ�δ�����κβ��㡣�����е�ʵ�����ϱ�����������������һ�ֵȽ���������������Ŀǰ�����������ڹ��ڻ�δ���б�����
2.3.2 ����ʽ�Ƚ��������������������ۼ����Ʒ
2.3.2.1 ����ʽ�Ƚ���������������������
����ʽ�Ƚ�������
a.�����ཻʱ�����ύ�������ϵ��λ�����������ɼнǵ�ƽ�����ϣ���ʵ�������������Ƚ���ת�����ֳ�ͬ������
b.�������ʱ����һ���������������Ӳ���ʵ�ֵȽ���ת����Ŀ�ġ�
����֤�����£�
�����������ĵȽ�������
2.3.2.1.1 �����롢������ཻʱ�ĵȽ�������
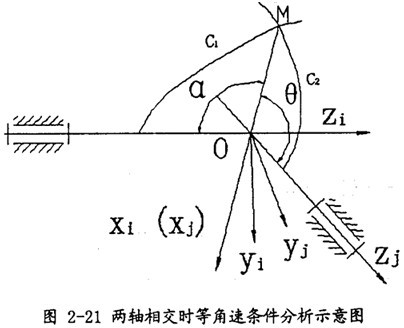
�Ƚ�������������Ϊ��ͼ2-21��ʾ����ѧģ�͡�����ģ�ͼ�����ϵ���£�Zi��Zj�ֱ��������������ᣬXi��Xj���غϣ�����ֱ��Zi��Zj����ɵ�ƽ�档�����ļн�Ϊ�¡��ر���˵�����ǣ�����������������ϵ��Ϊ��������ϵ��Ϊ�����������Y��һ�㲻�ٱ�����ɸ������ֶ����ж��䷽��
����M������������ϵ㣨�˶�����C
1��C
2�Ľ��㣬Ҳ���Ǵ����㣩�����ʼ����Ϊ����ʱ��t=0ʱ��

��������ת�ǣ���

�������ת�ǣ���Ϊ�㣬��������ϵOX
iY
iZ
i��OX
jY
jZ
j������C
l��C
2�ķ��̷ֱ�Ϊ��
��ͼ2-21��ʾ������ϵOXjYjZj���Կ���������ϵOXiYiZi��Xi����Xj����ת��һ���Ǧ¶ȡ���ת�ķ������Ҿ���Ϊ��
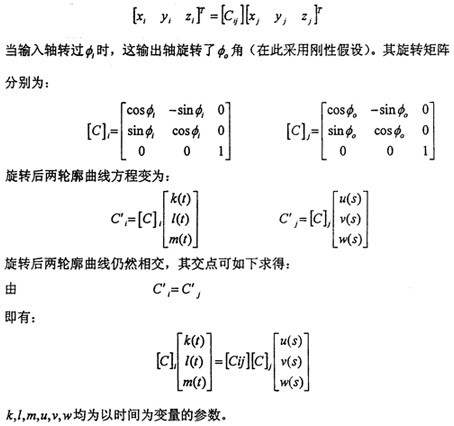
��������任�У�����������ϵOXjYjZj�任������ϵOXiYiZi���У�Xi��Yi��Zi������Xj��Yj��Zj���ֱ��ʾij����������ϵ�е����ꡣ��
����

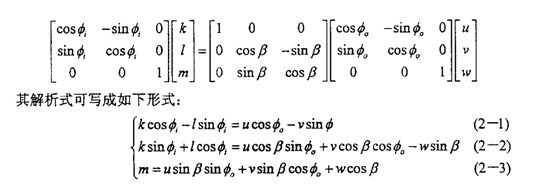
�ͦ½���֪������������ֻ������δ֪����

��t��s�����������ֵ�����ܹ�ȷ����⡣
�Ƚ��������ĵ�����
�����������������ͬ���ģ�����
=
��
��
��ȡ����ֵ��
��ã�
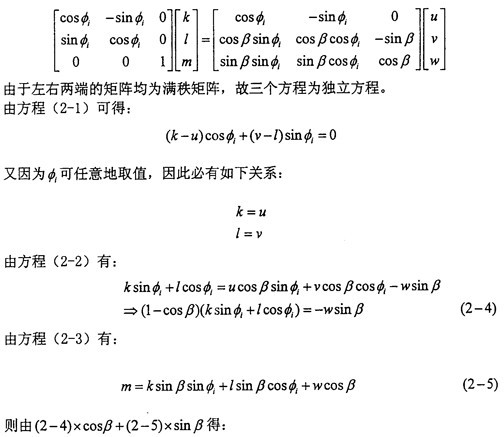
msin��=��1-cos�£���ksin i+lcos i��
����y����һ����Χ�������ȡֵ�����У�
m=-w
�ۺ������������õ������ཻ���������������ͬ���Ե�����Ϊ��
����
�ͦµ�ȡֵ������ģ�����MҲ������ģ���������߷�����������ͬ������ʱ�����ܱ�֤���롢�������ȫͬ���������ǵIJ�������Ϊ��
�������ߵĽ���M�����ϵ㣩������Ľ��㡣������OM�������ᣨZ
i��ĸ����ᣩ�ļнǺ͡�M�������ͼнǷֱ�Ϊ�����ڴ˴�|OM|=

����ʾ���ϵ������ύ���ľ��롣��
�ɴ˿ɵ�cosa=cos�ȣ�����0��180�� 0�ܦȡ�180�㡣����a=�ȡ������֮�����ཻ����ȫͬ���Ļ��������ǣ����ύ�������ϵ��λ�����������ɼнǵ�ƽ�����ϡ�
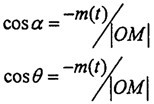
2.3.2.1.2 �����ᡢ��������ʱ��ͬ�����о�
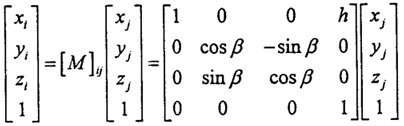
���������λ����ͼ2-22��ʾ������ģ�ͼ�����ϵ���£�Zi��Zj�ֱ�Ϊ�����ᡢ����ᣬ��Xi��Xj����Zi��Zj�Ĺ������غϣ�hΪ��������̾��룬����н�Ϊ�¡�
��������任��������ϵOXjYjZj�е�ij����OXiYiZi����ϵ�е�����ɱ�ʾΪ��
�ڴ˱�ʾ����ϵ�任�����������ϵ�M�������������ã�
�˴�
��
�ֱ��ʾ�����ᡢ�����������ʱ��ת��������Ƕȣ�����ʽ���ǿɵ������µĹ�ϵʽ��
�����ʱ�����ܹ�ʵ��ͬ������
=
������ʽֻ������δ֪����ͨ�����㣬����Ե��������˶����������ߴ�����ij�ֹ�ϵ��
�裨2-6���������ͨ���Ƚ����˵�ϵ���ɵã�k=u��l=v��h=0
����Ȼ����֪��������Ϊh��0���ɼ����費������
�����裨2-8��ʽ�����������m=0,u=O,w=0,v=O�����루2-7��ʽ�пɵ�k=l=0����Ȼ�������Ǻ�������ģ���˼��費������
ͨ�����ϵķ���������֪�����������ʱ��������ģ���£���һ���������������Ӳ���ʵ��ͬ����Ŀ�ġ�
2.3.2.1.3����ʽ�Ƚ������������������ܽ�
����ʽ��ָ�����ཻʱ���������������֤�������漰�����������ʱ�ĵȽ�������֤������δ�ó��κν��������ʵ����ֻ�ж���ʽ�ĵȽ������۵õ���֤������֤�����õ���ģ�ʹ�����ֻ��һ���������˵���۵ĵõ��ǽ���������������ģ�����м乹��ֻ��һ�������������һ��������˽��۾Ͳ�һ����ȷ�ˣ������Ҳ��������һ���۵�Ӧ�÷�Χ��
2.3.2.2����ʽ�Ƚ��������������IJ�Ʒ
��������������������ڽṹ��������������ʼ���ཻ��һ�㣬ֻͨ�����������������ǵ��͵Ķ���ʽ�Ƚ������۵�Ӧ�á�
2.3.2.2.1����ʽ����������
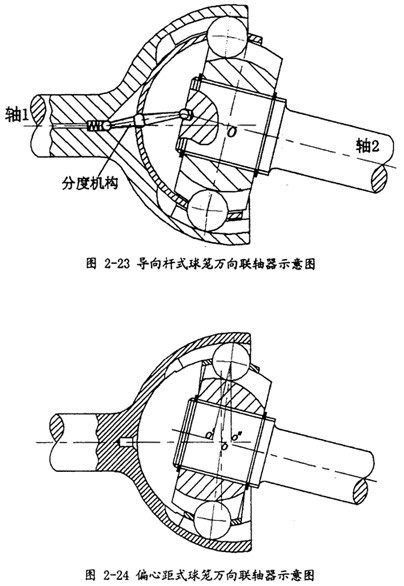
����ʽ������������Ŀǰ������������Ӧ����㷺��һ�ֵȽ������������������ݽṹ��ʽ�IJ�ͬ�ɷ�Ϊ�����࣬�������ʽ����������������ƫ�ľ�ʽ�����������������ֱ���ͼ2-23��ͼ2-24��ʾ��
�����ʽ����������������ϸ���������۵�Բ�����ĺͱ��ּ�������������ľ��غ�ȷ������ڵ�����o���ֲ��䣬��ͼ2-23��ʾ��������������ԵĽ�λ��ʱ��ͨ������˵�������ʹ����ֲ�������������Խ�λ�Ƶĵȷֽ�ƽ���ϣ��Ӷ���֤����ͬ���������ʽ������������������������϶ࡢ��װ���㣬��Ӧ�����ܵ���һ�������ơ�
ƫ�ľ�ʽ������������������ϸ���������۵�Բ������o���o������ͬƫ�ľ�ֱ����ڶԳ��ߣ���ͼ2-24����ɫ�㻮����ʾ�������࣬������������ԵĽ�λ��ʱ����ʹ����ֲ���������Ե��Խ�λ�Ƶĵȷֽ�ƽ���ϣ��Ӷ���֤����ͬ����
����ʽ�������������ص㣺ͬ���Ըߡ���λ�ƴṹ�����С�������ŵ㡣���γ�ϵ�У����㷺Ӧ����������ұ���Ṥ�����ͻ�е�Ȳ��š�
2.3.2.2.2��������������
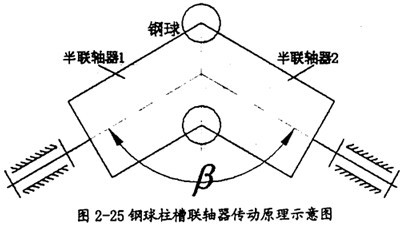
��������������ͬ����ʽ����������һ������Ҳͨ������������������������֮�������������������������������ԵĽ�λ��ʱ�����������ϵĹ�����ʹ����ֲ�������������Խ�λ�Ƶĵȷֽ�ƽ���ϣ���ͼ2-25��ʾ�����Ӷ���֤����ͬ����ͬ����ʽ������������ͬ�������ĸ���ֲ���һ����Բ���ϣ�������ʽ������������ֲ���һ�������ϡ�
����������������һ�ֽṹ��Ϊ������������ĵ������������������ʵ�ü�ֵ���������ڽṹ�ϵ���������������������ƫת�ǽ�С��
2.3.3�Ƕ���ʽ�Ƚ����������������ۼ����Ʒ
2.3.3.1�Ƕ���ʽ�Ƚ���������������������
�Ƕ���ʽ�Ƚ������ۣ�
����������������ת��˲ʱת���˲ʱת������������λ�ڻ�ƽ��������ĵȷֽ�ƽ�档
����֤�����£�
2.3.3.1.1���������������Ƚ��ٴ����ı�Ҫ����
�赥�������������Ľ��ٶ�Ϊ

����������������˲ʱ���ٶ���ȣ�����ٶ���

����ʾ���������ཻ��0�㣬ƫת�Ǧ���ʱ���ƫת���ٶ�Ϊ

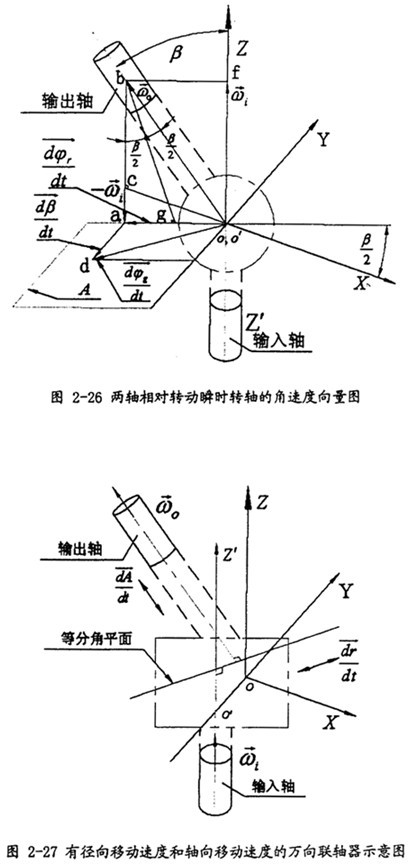
���Դ�������������ͼ2-26��ʾ��ת����ϵʾ��ͼ��
���������ϵͳ����һ�����ٶ�-

�������������ѧ�е�֪ʶ��֪������������Ĺ�ϵ�Ա��ֲ��䣬��ʱ������Ľ��ٶȱ�Ϊ�㣬����������˶���������ķ�����������
��ͼ2-26��ʾ��ʹ

ʸ������

��

ʸ������-
���ҡ�bo��f=�£���

ƽ����
���������
�����abo��������������b����

�Ĵ��ߣ��ô���g��

���߽���abo��ȷֳ�����ֱ�������Σ�������ֱ�����������aco��Ϊ���������Ρ�
���ڣ�

����

λ������ĵȷֽ�ƽ���ڣ����-
��
�ĺϳ�ʸ��������������������Ľ��ٶ�

Ҳλ������ĵȷֽ�ƽ���ڡ�

�Ĵ�С��ͨ����o��gb�͡�ogb�����㣺
=2��
0sin
����

ʸ������������������ߴ�ֱ������
��
�ĺϳ�ʸ��

=
+
Ҳλ������ĵȷֽ�ƽ���ڡ��ϳ�ʸ��

��λ�þ���˲ʱת���λ�á�
���������ཻ�ĵȽ���������������������������������ת��˲ʱת��ʼ��λ������ĵȷֽ�ƽ���ڡ����ǵ�������������һ�����Σ�����������������߲���λ��ͬһƽ���ڣ��������������ߺ�������ߴ�ֱ�ľ���λ�ƣ����о����ƶ��ٶȺ������ƶ��ٶ�

��

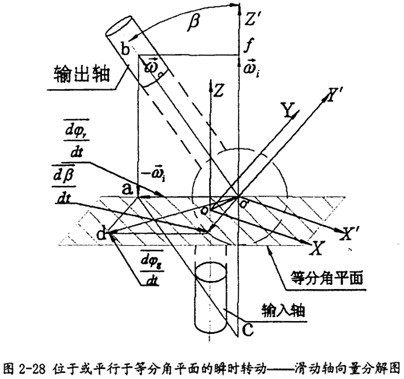
����ͼ2-27��ʾ��
��Щ�ƶ��ٶȲ�Ӱ����ٶ�ʸ���ϳɣ�����Ӱ��˲ʱת������������ķ�λ�����ǶԽ��ٶ���ȷ����˲ʱת�������������λ����һ��Ӱ�죬��ʱ�����������������˲ʱת�������������λ�ڶ���ƽ��������ĵȷֽ�ƽ�档��һ�������������ٶȴ�С���Ϊǰ�������Ƶ������ģ�������Ϊ�����������������ձ�������Ӧ�ã��ֽ��������������£�
���е��ٴ������Եĵ��������������ı�Ҫ����Ϊ��������ת��˲ʱת���˲ʱת������������λ�ڻ�ƽ��������ĵȷֽ�ƽ�档
2.3.3.1.2���������������Ƚ��ٴ����ij������
����������֮Ҳ��������һ������£����������һ���������������ӣ������ת����˲ʱת���˲ʱת���D������λ�ڻ�ƽ��������ĵȷֽ�ƽ�棬����������������еȽ��ٴ������ԡ�
��ͼ2-28��ʾ���������������ͨ��һ������������J���ӣ�����нǦ�Ϊ�������������������������˲ʱת�����������ᣬ��ʸ��

����ʾ˲ʱת������������ķ���ʸ��

ƽ��������ĵȷֽ�ƽ�档�ֽ�
�����λ���ƶ���O�䴦��ʹ
λ������ĵȷֽ�ƽ���ڣ���
�ֽ�Ϊƫת���ٶ�
����Խ��ٶ�
��ͼ2-28��ʾ������
λ�ڵȷֽ�ƽ���ڣ���������
Ϊ�ϳ�ʸ����
KTYS`82XIP{DV11.tmp)
��

Ϊ��ʸ��������ƽ���ı���abo��c�У�

=

����Ϊ

λ������ĵȷֽ�ƽ���ڣ�

=

���ڴ�����ȣ������ԡ�abo��Ϊ���������Σ�����Ϊab=o��c�����Ԧ�
i=��
0���������������еȽ��ٴ������ԡ�
2.3.3.1.3�Ƕ���ʽ�Ƚ������������������ܽ�
����һ����֤�������õ�ģ�ͺ�֤�����̿��Կ���������֤�����Ǵ��������������������֣���δ�漰�����������м䴫��������������һ�ֺ������ۡ��ʶ���һ����֤�������õ�ģ�;��й㷺�Ĵ����ԣ����۱���Ҳ�й㷺�����÷�Χ�������˵��������������λ�ڻ�ƽ���ڵȷֽ�ƽ���������������������������е��ٴ������ԡ���������һ������ǰ�����������ǰ����һ����
2.3.3.2�Ƕ���ʽ�Ƚ��������������IJ�Ʒ
ͬ�Ƕ���ʽ�Ƚ����������������������������������Ʒ��Ҫ�����¼��֡����⼸�����������������ǵ������߲����ǽ���һ������ĵ㣬��Ҳ���ǷǶ���ʽ�ĸ��
2.3.3.2.1������ʽ����������
������ʽ������������һ�ֱ��㷺Ӧ�õ������������н�30�����ʷ����ͬ��������������������ͬ������ʽ���������������ǵĴ���ԭ���ڱ��ĵĵ�����������ϸ����������һ���˶�����ʮ�ָ��ӵ�������������װ��ģ�ͺ��㲿��ģ�ͷֱ���ͼ2-30��ͼ2-29��ʾ����������ת��ʱ�����ݹ��Ӽȿ���Ի������еĻ��������ƶ���Ҳ��������˵��ᾱת���;����ƶ����Բ�������нǵı仯��
������ʽ������������һ���Ƚ���������������������Ƚ�����������ȣ������Ŀ���٣��ṹ���գ����۴���������Σ���������ȫ���μӹ�������˴���Ť������ǿ�������ɿ���������������˶���Ϊ����Ħ����Ħ����ʧС������Ч�ʸߡ��������Ĺ���ͬ�����ĽӴ��Ǹ߸��߽Ӵ��������нӴ�Ӧ���ϴ���һ���ij̶��Ͽ������������Ĵ���������
2.3.3.2.2����˻���ʽ����������
����˻���ʽ�������������·�չ������һ�ֽ��������������������װ��ģ�ͺ��㲿��ģ�ͷֱ���ͼ2-32��ͼ2-31��ʾ�������˶���ʽ�ڱ��ĵĵ�����������ϸ�������������������ʽ����������������ǰ�ߵĸ߸��߽Ӵ���Ϊ��Ӵ����������������Ĵ���������
�����������ṹ�����칤�ռ�����ƽ�ȣ������롢����������߳ɽϴ�ļнǴ���ʱ���ܱ�֤�Ƚ��ٴ��������ܡ�
����˻���ʽ������������Ϊһ�����ͷǶ���ʽ�����������ܴﵽ�Ƚ��ٴ����Ҿ����������ܣ����й�����Ӧ��ǰ����
2.3.3.2.3����˻���ʽ����������
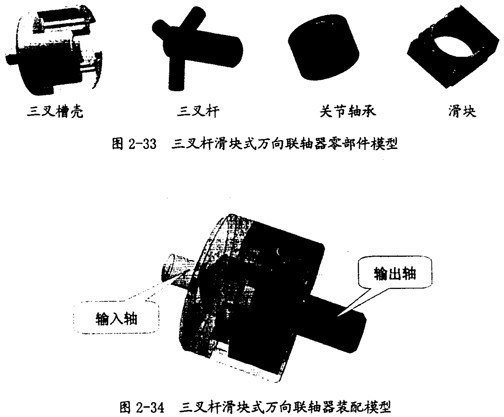
����˻���ʽ������������һ�����͵���������������װ��ģ�ͺ��㲿��ģ�ͷֱ���ͼ2-34��ͼ2-33��ʾ����ͬ����˻���ʽ����������ֻ���ڽṹ�����в�ͬ����ǰ�ߵĻ��˱�Ϊ�˻��飬�������ڽṹ�ϵ����ƣ���ƫת����Ա�С�����䴫�����������ߡ�
�����������ṹ�����գ�����װ�䲻��ר���豸�����ռ���۵ͣ���������ǿ�����й�����Ӧ��ǰ����������ͬ����˻���ʽ����������һ����������ܺ�����ƣ������������Ͽ��ܾ���Խ϶̡�
2.3.3.2.4������Ƚ�������������
������Ƚ���������������װ��ģ�ͺ��㲿��ģ�ͷֱ���ͼ2-7��ͼ2-6��ʾ����һ��������Ŀǰ��ͣ�����о��Ρ����������˶�����Ϊ�������칤�ռ���ʵ�ֽ�����ĵȽ��ٴ������������ص��ǿ����ڽ�������£�����90�ȼнǵ��˶������������������£���
2.4��ͬ���۵����÷�Χ����ϵ
��ǰ�������������У����Կ������Dz�����������������ڸ��Ե����÷�Χ���������ϵ��
˫��ʮ������������������ֻ���ʮ�����������������ã���������ʽ��THOMPSONʽ�������������ֺ����Ƕ������÷ֶȻ�����������ת���ȷֽ�ƽ�棬��һ��ͬ����ʽ�Ƚ��ٵ�������ͬ�����Ƕ���ʽ�Ƚ��ٵ����۳��ֺ���������ǰ������еȽ������ۣ���Ϊ�������������Ƚ��ٴ������ձ���ɡ�
2.5������
���½�Ϊϵͳ���ܽ������еĵȽ������ۣ�Ϊ���͵ĵȽ��������������ṩ�����ۻ�����
�ӵȽ��ٻ�ת���˻���̽�����֣����ɲ��ܽ����ڵȽ��ٻ�ת���˻��������³ɹ���˵���ж�����ʽ�����˻������е��ٴ������ԣ�������Ϊ���͵Ƚ����������������ƵĻ���ѧ������
�����е����ֵȽ������ۼ�����Ӧ�ĵ��Ͳ�Ʒ���������ܽ�ͱȽϣ����������Ǹ��Ե����÷�Χ��������ϵ��Ϊ��һ���ĵȽ��������о������˻�����ҲΪ���͵Ƚ��������������ķ����ṩ������ָ����