三叉杆式万向联轴器的运动仿真
4.1引言
计算机技术的发展为仿真技术提供了强有力的手段和工具。由于可以在计算机上建立机械系统的运动学、动力学模型并能迅速、灵活地进行虚拟试验,得出机械系统的各项性能参数,为设计部门在降低机械系统的研制成本,缩短研制周期,提高试验的安全性方面起到了重要的作用。目前计算机仿真分析在产品设计研制中占有越来越重要的地位。
本章中引入计算机仿真技术,利用目前世界上最具权威的机械系统虚拟样机仿真软件ADAMS对十字轴式万向联轴器、单联三叉杆式万向联轴器和双联三叉杆式万向联轴器进行了运动学仿真,得到了许多可视化的数据结果。验证了利用AOAMS进行机械多体系统仿真的有效性和正确性,同时得到了三叉杆式万向联轴器以前未被发现的运动规律,为这种联轴器的进一步开发利用提供了基础。
4.2理论背景
4.2.1虚拟样机技术
虚拟样机技术(Virtual Prototype Technology简称VPT)是当前设计制造领域的一门新技术。它是基于虚拟样机的先进的数字化设计方法。它不是一项具体的技术,而是涉及多体系统动力学、计算方法、软件工程等学科,将这些相关技术运用系统工程和信息集成技术结合成一个有机的整体。它利用软件建立机械系统的三维实体模型和力学模型,分析和评估系统的性能,从而为物理样机的设计和制造提供参数依据。
虚拟样机技术侧的基本概念是指在产品设计开发过程中,将分散的零部件设计和分析技术(指在某单一系统中零部件的CAD和FEA技术)揉合在一起,在计算机上建造出产品的整体模型,并针对该产品在投入使用后的各种工况进行仿真分析,预测产品的整体性能,进而改进产品设计、提高产品性能的一种新技术。虚拟样机技术在产品设计阶段,一就可以对整个系统进行完整的分析,可以观察并试验各组成部件的相互运动情况。使用系统仿真软件在各种虚拟环境中真实地模拟系统的运动,它可以在计算机上方便地修改设计缺陷,仿真试验不同的设计方案,对整个系统进行不断改进,直至获得最优设计方案后,再制造出样机。
为了加快产品的更新,提高市场的竞争力,将投资风险降到最低,虚拟设计在现代工程中的地位将会越来越重要。
4.2.2多体动力学简介
多个物体通过运动副连接在一起组成的系统称为多体系统。多体动力学是研究多体系统中载荷和系统运动的关系。包含两部分,即多刚体系统动力学和柔性多体系统动力学。
多刚体系统动力学的解算方法有拉格朗日模型及算法、笛卡尔模型及算法、凯恩方法等等。(ADAMS中采用了世界上广泛流行的多刚体系统动力学理论中的拉格朗日模型及算法。)
4.2.3ADAMS简介
4.2.3.1ADAMS的功用和组成
4.2.3.1.IADAMS的功用
理想的仿真应能满足以下几点要求:建模简单快速、模型逼真、具有三维动画和便于调整仿真参数。另外,运动学与动力学的计算也是十分重要的工作,包括正解和逆解的计算,常规的算法大多采用牛顿——欧拉方程或拉格朗日方程,不仅工作量大,而且非常容易出错。我们也希望在设计过程中能尽早地发现一些问题,及时优化,由于未知量太多,工作量也很大,这一步的工作通常是在样机完成之后进行,从而造成效率较低和不必要的浪费。
我们更希望上述几项工作能有机地联系在一起.比如说,改动了模型后可以直接在仿真中把改动体现出来;调整了某设计参数或某关节的运动规律后无需改动程序就可以直接进行运动学与动力学的重新计算等等,但由于通常的工作方式是采用不同的软件分别处理上述几项工作,当参数有变动时,上述几项工作均需做相应的改动,工作量很大,非常不灵活。还易于出错。利用ADAMS软件能将这几项工作有机地结合在一起,并且非常简便相直观,可以大大提高工作的效率。
机械系统自动动力学分析软件ADAMS(Automatic Dynamic Analysis of Mechanical System)是由美国MDI公司开发的、目前世界上最具权威的机械系统虚拟样机仿真软件,功能强大,它为用户提供了强大的建模、仿真环境,使用户能够对各种机械系统进行建模、仿真和分析。和其它CAD、CAE软件相比,ADAMS具有十分强大的运动学和动力学分析功能。目前已广泛地应用于汽车制造、航空航天、铁道交通等领域。利用ADAMS软件可以快速、方便地创建完全参数化的机械系统几何模型。该模型既可以在ADAMS软件里直接建造,也可以从其它的CAD软件(如Pr/EUG等)中传入造型逼真的模型,然后再在模型上添加约束、载荷和运动激励,最后执行与实际工况非常接近的运动仿真测试,所得的测试结果就是机械系统工作过程的模拟运动情况。
4.2.3.1.2ADAMS的组成圆
ADAMS软件包括3个基本模块:用户界面模块(ADAMS/View)、方程求解器(ADAMS/Solver)、仿真结果后处理模块(ADAMS/Postprocessor)。
ADAMS/V1ew提供了一个直接面向用户的基本操作对话环境和样机分析前处理功能,包括样机的建模、数据输入与编辑、与求解器和后处理等程序的自动衔接等。
ADAMS/Solver是软件的核心部分,是求解机械系统运动和动力学问题的程序,在View的调用下完成模型的静力学、运动学、动力学的计算,并将计算分析结果自动返回到ADAMS/View。
ADAMS/Postprooessor具有很强的后处理功能,可以回放仿真结果,绘制各种分析曲线,并且可以对结果作数学和统计的计算。
除基本模块外,ADAMS还包含功能扩展模块、接口模块、专业模块、以及工具箱模块。其中在功能扩展模块中有ADAMS/Vibration(振动分析模块)、DAMS/Linear(系统模态分析模块)等。在接口模块中有ADAMS/Flex(柔性分析模块)等。ADAMS/Flex模块提供了ADAMS与有限元软件ANSYS、NASTRAN、ABAQS、I-DEAS之间的双向数据接口。利用此模块可以考虑物体的弹性,在模型中引入柔性体,从而提高仿真的精度。
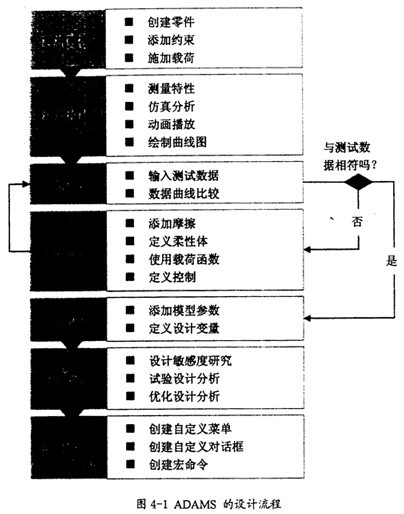
4.2.3.2用ADAMS建模、仿真的步骤
其步骤简述如下:
建造模型
建模包含三部分工作:
a.创建零件:ADAMS建模分析的基本步骤有两种途径:通过ADAMS/View的零件库来创建各种简单的运动单元(零件);用ADAMS/Exchange引入复杂的CAD形体(会影响运行速度):
b.给模型施加约束和运动;
c.给模型施加各种作用力。
测试模型
定义测量并对模型进行初步仿真,通过仿真结果检验模型中各个零件、约束和力是否正确。
校验模型
导入实际实验测试数据,与虚拟仿真的结果进行比较。
模型的细化
经过初步仿真确定了模型的基本运动后,可以在模型中加入更复杂的单元,如在运动副上加入摩擦,用线性方程或一般方程定义控制系统,加入柔性连接件等等,使模型与真实系统更加近似。
模型的重新描述
为方便设计,可以加入各种参数对模型进行描述,当用户对模型进行了更改,这些参数自动发生变化,使相关改动自动执行。
优化模型
对模型进行参数分析,优化设计。
定制用户自己的环境
用户可以定制菜单、对话框,或利用宏使许多重复工作可以自动进行。
ADAMS建模、仿真的流程如图4-1所示。
4.2.3.3ADAMS分析原理
ADAMS采用了两种直角坐标系:总体坐标系和局部坐标系,它们之间通过关联矩阵相互转换。总体坐标系是固定坐标系,它不随任何机构的运动而运动。它是用来确定构件的位移、速度、加速度等的参考系。局部坐标系因定在构件上,随构件一起运动。机构的自由度((DOF=6×(构件总数-1)一约束总数)构件总数中包含地面,在这个公式中仅是一种大约的自由度数,ADAMS会在此基础上再一次计算真正的自由度数)是机构所具有的可能的独立运动状态的数目。在ADAMS软件中,机构的自由度决定了该机构的分析类型:运动学分析或动力学分析。
当DOF=O时,对机构进行运动学分析,即仅考虑系统的运动规律,而不考虑产生运动的外力。在运动学分析中,当某些构件的运动状态确定后,其余构件的位移、速度和加速度随时间变化的规律,不是根据牛顿定律来确定的,而是完全由机构内构件间的约束关系来确定,是通过位移的非线性代数方程与速度、加速度的线性代数方程迭代运算解出。
当DOF>O时,对机构进行动力学分析,即分析其运动是由于保守力和非保守力的作用而引起的,并要求构件运动不仅满足约束要求,而且要满足给定的运动规律。它又包括静力学分析、准静力学分析和瞬态动力学分析。动力学的运动方程就是机构中运动的拉格朗日乘子微分方程和约束方程组成的方程组。
当DOF<O时,属于超静定问题,ADAMS无法解决。
4.2.3.4ADAMS工程流程
ADAMS的整个计算过程(指从数据的输入到结果的输出,不包括前、后处理功能模块。)可以分成以下几个部分:
数据的输入;
数据的检查:
机构的装配及过约束的消除;
运运方程的自动形成;
积分迭代运算过程;
运算过程中的错误检查和信息输出;
结果的输出。
4.3运动仿真的有效性及正确性的检验
在进行本文的仿真分析之前,我们必须对利用ADAMS作为分析工具的有效性和正确性作出检验。由于十字轴万向联轴器的运动规律早已被人们所熟知,且已有大家公认的解析公式,故本章以十字轴万向联轴器的运动规律作为检验的标准,看仿真得到的可视性结果同它的解析公式得到的结果是否一致,如果一致,则证明利用ADAMS作为分析工具是有效和正确的。
4.3.1模型的建立
在建立模型前需注意如下因素:
外形简单的零件用ADAMS建模非常方便,对于形状复杂的零件,相对于UG、Pro/E等软件,ADAMS则稍显逊色。一般来说,可以先用UG、Pro/E等软件对复杂的零件进行建模,再将建好的模型传入ADAMS中进行仿真分析。这样可以大大提高机构分析的效率。
在用ADAMS建模之前,根据运动副对模型进行简化,将各个零件之间的运动副表示清楚。这样不仅可以节省大量的建模时间,也可以保证ADAMS的仿真及分析过程能够顺利进行。同时,由于ADAMS在进行运动学、动力学求算时,只考虑零件的质心和质量,而对零件的外部形状不予考虑,因此在模型中精确地描述出复杂的零件外形,并没有多大的实际意义。故模型外形应尽量简化。当然,零件形体描述得越准确,ADAMS自动求算的零件质量和质心位置也就越精确,但复杂零件的建模并不是ADAMS的特长。
多个零件固结时,可以只用一个零件表示,节省运动副数量。因为运动链越长,计算误差越大。
4.3.1.1建立装配模型
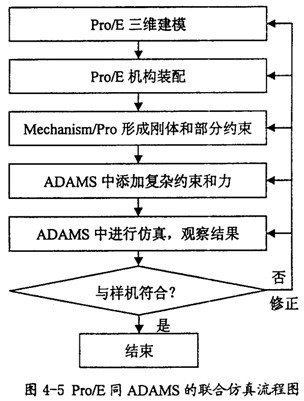
当前,在工程领域,应用美国PTC公司的CAD软件Pro/E和美国MDI公司的动力学仿真软件ADAMS联合进行复杂机械系统的动力学仿真研究是一种较实用、较流行的仿真方案。本文的仿真分析中所有模型均是采用这种方案。考虑到建模的注意因素,在用Pro/E建模的过程中,省去了十字轴万向联轴器的许多细小结构,如润滑部分、滚针轴承、弹簧卡圈等,只是保留了十字轴万向联轴器在原理上进行传动的必需构件和运动副。在此原则下建立的十字轴万向联轴器的各构件模型如图4-2所示,实际上只包含十字轴和传递叉两个活动构件。建立的十字轴万向联轴器的装配模型如图4-3所示。
4.3.1.2建立运动分析模型
将装配模型转变为运动分析模型必须在装配模型的基础上加上运动副和运动驱动。由于Pro/E中的图形导入ADAMS中形成可作为刚体进行分析的shell时,会丢失大部分几何特征,如圆变成了多边形,旋转体的轴线丢失等等。在这种情况下如果再对模型添加运动副和运动驱动,则比较困难,故而我们可以利用MDI公司为ADAMS和Pro/E间做的专用接口模块Mechanism/Pro,通过Mechanism/Pro(以挂接在Pro/E菜单管理器下的一个子菜单形式存在),先在Pro/E中添加较简单的运动副和运动驱动(一般而言,由于导入到ADAMS后,图形的部分几何信息丢失,在添加运动副和运动驱动时不能定位,故能在mechanism/Pro下添加的约束尽量在Mechanism/Pro下进行),然后再导入到ADAMS中,这样做的效率较高。
在Prp/E中,对装配模型中的十字轴和两个传递叉间分别添加上两个旋转副,在一个传递叉和支承间添加上一个旋转副,在另一个传递叉和另一个支承间添加一个圆柱副(实际上旋转副也可),再将模型转到ADAMS中,在一端的传递叉和支承间的旋转副上添加上一个运动驱动,大小为180°/s。这样就得到了十字轴万向联轴器的运动仿真模型。模型如图4-4所示。

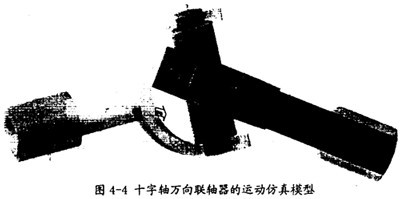
通过对模型的验证,可知此模型中共有3个移动件,l个圆柱副,3个旋转副,1个运动驱动,机构的自由度为0,机构中有冗余的约束方程(在这种情况下求出的运动反力是不正确的)。
4.3.2运动仿真
在运动仿真中须注意如下几点:
在仿真分析中,要求输入仿真步长参数,如果输入步长过大,则给出的值可能不精确,随着模型的变化从这一输出点突然跳到下一输出点,得到不连续的结果,输出的曲线也不光滑。要确定有足够的步数能捕捉到输出的尖峰或谷底,否则就要在整个仿真过程中减小步长。但是减小步长会增加仿真的计算时间,需要更多的计算机资源;
在仿真分析中如果步长太大,可能使数值计算不收敛,导致仿真失败,故仿真中选取合适的步长是比较重要的。
运动仿真:
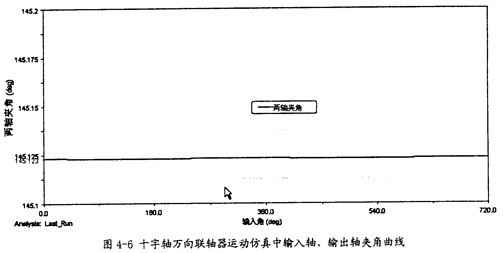
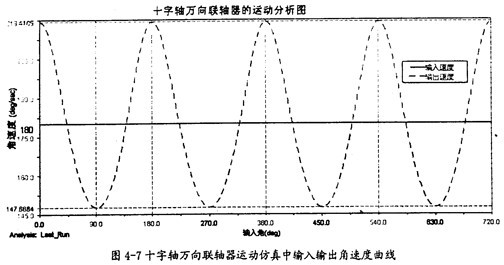
选取合适的步长,在缺省模式下(由前面的自上度为0,可知此时的仿真是运动仿真)对模型做仿真分析,并在结果中输出两轴夹角的测量值曲线图(如图4-6所示)以及输入、输出轴角速度测量的曲线图(如图4-7所示)。
在仿真中如果发现结果不对,则我们需要对前面的模型进行修正,然后再做仿真分析,直到结果正确。决而言之利用Pro/E和ADAMS进行联合仿真,其基本的步骤如图4-5所示。
4.3.3仿真结果分析
由图4-6可知,仿真中十字轴万向联轴器的两轴夹角实际上即是34.88°(原夹角的补角),在第二章的十字轴万向联轴器理论计算曲线图中也包含了这个夹角下的运动分析曲线(图2-12),比较图2-12中β=34.88°的曲线和图4-7的曲线,可知两条曲线在变化频率、形状、值的大小都是一样的。
4.3.4结论
由上面的分析结果可知,利用ADAMS进行的仿真在一定的程度上是有效的、正确的。另外据文献介绍,物理样机实验结果与虚拟样机用ADAMS的仿真结果吻合程度超过95%,这进一步证明了利用ADAMS进行仿真的可行性。
4.4单联三叉杆式万向联轴器的运动仿真
4.4.1仿真模型的建立
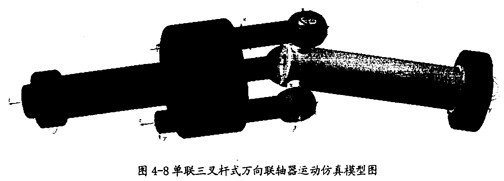
在本次分析中,建立的装配模型同第三章中图3-2所示的模型具是完全一样的,在这个装配模型的基础上通过添加运动副和运动驱动构成图4-8所示的运动仿真模型。添加的运动副和运动驱动如下:
在滑杆套轴(输入轴)和左支承间添加旋转副;
在小杆同滑杆套轴间添加移动副(本来圆柱副也可,这里提局部自由度);
在内球头同小杆之间添加球面副;
在内球头同三叉杆轴颈之间添加圆柱副;
在三叉杆同轴承内圈之间添加圆柱副;
在轴承内圈同轴承外圈之间添加球面副;
在旋转副上添加恒速驱动,大小为90o/s。
通过模型检验,可知模型中:
有9个移动件、3个圆柱副、1个旋转副、4个球面副、3个移动副、1个固定副、1个驱动,模型共有3个自由度。
4.4.2运动仿真
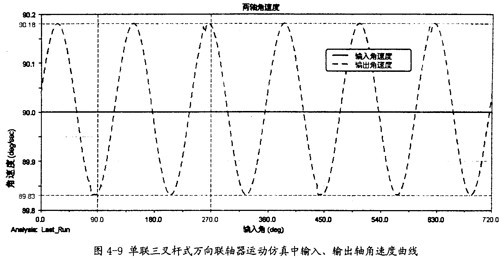
设定一定的步长,对模型进行仿真分析,并输出如下测量的结果:输入、输出轴角速度曲线(如图4-9);
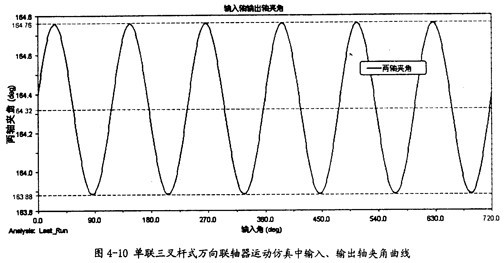
输入、输出轴夹角曲线(如图4-10);
小杆、轴颈滑移速度曲线(如图4-11);
小杆、轴颈滑移位移曲线(如图4一12);
小杆、轴颈滑移加速度曲线(如图4一13);
输出轴角加速度曲线(如图4-14);
三叉杆三轴颈轴线交点(以后简称三叉交点)的跟踪轨迹(如图4-15所示,左图为相对大小,右图为放失图)。
两轴角速度
4.4.3仿真结果分析
由图4-9可以知道,当输入轴转速恒定为90o/s时,输出轴并不作恒速转动,而是以90o/s为中心,作非常有规律的周期性运动,在每一个回转周期中,它的变化频率为3次。这里的结果同第三章中的曲线图3-8也是完全吻合的,因此在一定的程度上也证明了三叉杆万向联轴器转速分析理论的正确性。
由图4-10可以知道,输入轴同输出轴的夹角在三叉杆式万向联轴器运转时是不断变化的,在每一个回转周期中,它的变化频率为3次,这证明了这种联轴器是一种非定心式万向联轴器,同时在一定的程度上验证了三叉杆式三轴颈的交点以三倍于万向联轴器的转速作圆周运动的理论的正确性。另外还可看出尽管夹角在不断变化,但变化非常小,对两轴的夹角大小影响很小,本次仿真中夹角大小平均是164.32°(其补角为15.7°,即是第三章中理论计算中的角度之一)。
由图4-11可以知道,在一定的夹角下,小杆在滑道中的滑移速度同小杆球面中心相对轴颈的滑移速度是不同的,前者要远大于后者,且它们变动的频率也不一样,在一个回转周期中,前者频率是1次,而后者是2次。此图中的两曲线同第三章中的理论分析曲线图3-11、图3-12是吻合的,只是小杆滑移的速度曲线在外形上有一点差异,仿真的曲线相当的平滑、规则,但理论分析曲线却不规则,这可能是在计算中简化和省略的原因。尽管如此,这也证明了三叉杆式万向联轴器理论分析中对小杆滑移速度和轴颈滑移速度这两项计算的正确性。

由图4-12可以知道,在一定的夹角下,小杆在滑道中的滑移位移同小杆球面中心相对轴颈的滑移位移是不同的,前者(20.76mm)要远大于后者(2.93mm),且它们变动的频率也不一样,在一个回转周期中,前者步率是1次,而后者2次。此图中的两曲线同第三章中的理论分析曲线图3-9、图3-10是吻合的。这在一定的程度上也证明了三叉杆式万向联轴器理论分析中对小杆滑移位移和轴颈滑移位移这两项计算的正确性。
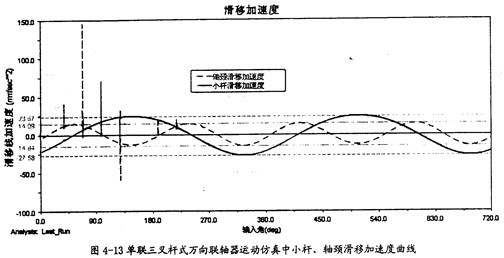
由图4-13可以知道,在一定的夹角下,小杆在滑道中有滑移加速度同小杆球面中心相对轴颈的滑移加速度是不同的,前者要大于后者,且它们变动的频率也不一样,在一个回转周期中前频率是1次,而后者2次。此图中的两曲线同第三章中的理论分析曲线图3-13、图3-14是吻合的,只是小杆滑移的加速度曲线在外形上有差异,仿真的曲线相当的平滑、规则,但理论分析曲线却不规则,这可能是在计算中简化和省略的原因。尽管如下,这在一定的程度上也证明了三叉杆式万向联轴器理论分析中对小杆滑移加速度和轴颈滑移加速度这两项计算的正确性。(值得说明的是此图中曲线有时有突变的现象,主要是考虑到计算机的性能,计算中步长稍大的原故。在后面的分析曲线中也出现了这样的情况,将不再作说明。)
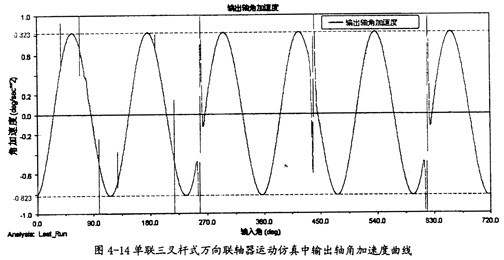
由图4-14可以看出,由于输出轴角速度的波动,其角加速度也是在不断变化,当两轴夹角在15.7°时,这种波动的幅度也是相当小,这证明由角加速度引起的附加扭矩非常小,这样的结果是这种联轴器在传动中运转应该是较为平稳的。
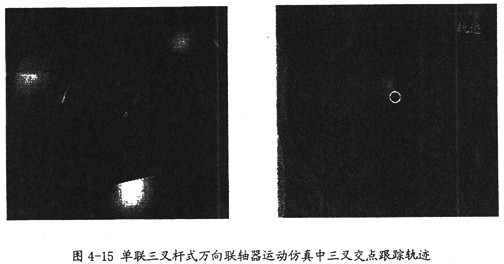
由图4-15可以看出,在单联三叉杆式万向联轴器的运动仿真中,三叉交点运动轨迹是一个圆,相对于半径值R(此值的意义见第三章)它的半径是相当小的,这也解释了为何运动中两轴夹角在不断作微小的变化,同时也证明了轴头中心轨迹理论的正确性。
4.4.4结论
通过以上的结果分析,可以确定的说,单联三叉杆式万向联轴器的理论分析结果和其计算机仿真的结果可以相互验证,这在一定的程度上说明以前的理论分析是正确的。
4.5双联三叉杆式万向联轴器的运动仿真
4.5.1仿真模型的建立
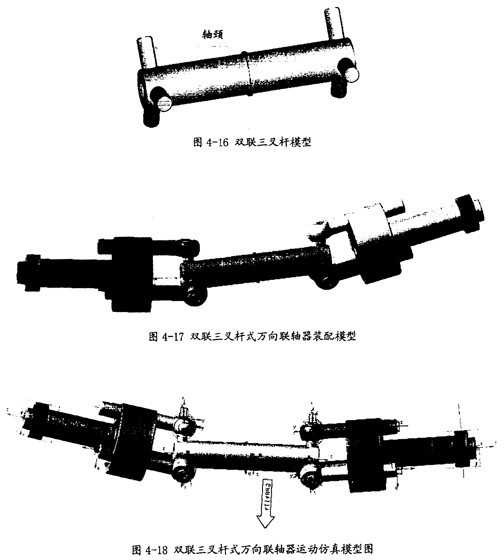
在本次分析中,建立的装配模型是在第三章中图3-2所示的模型的基础上除去关节轴承,将三叉杆用图4-16所示的双联三叉杆替换,在此模型的右端再加上同左端相同的结构,就得到双联三叉杆式万向联轴器的装配模型。此模型如图4-17所示。
在这个装配模型的基础上通过添加运动副和运动驱动构成图4-18所示的运动仿真模型。添加的运动副和运动驱动如下:
在滑杆套轴和左支承间添加旋转副;
在小杆同滑杆套轴间添加移动副(本来圆柱副也可,这里是局部自由度);
在内球头同小杆之间添加球面副;
在内球头同双联三叉杆轴颈之间添加圆柱副;
在旋转副上添加恒速驱动,大小为90o/s。
通过模型检验,可知模型中:
有15个移动件、6个圆柱副、2个旋转副、6个球面副、6个移动副、1个驱动、模型共有7个自由度。
在此模型中将重力加速度设为O,即仿真是在无重力的环境下进行的。
4.5.2运动仿真
设定一定的步长,对模型进行仿真分析,并输出如下测量结果的曲线:
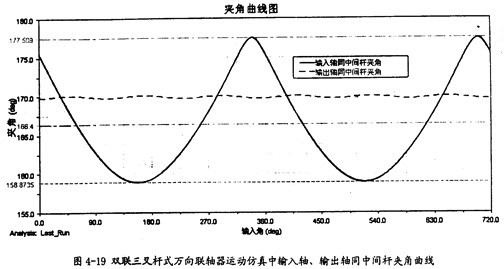
输入轴、输出轴同双联三叉杆(又称中间杆)夹角曲线(如图4-19);
中间杆同输出轴夹角曲线放大图(如图4-20);
输入、输出轴角速度曲线(如图4-21);
小杆和轴颈滑移位移曲线(如图4-22);
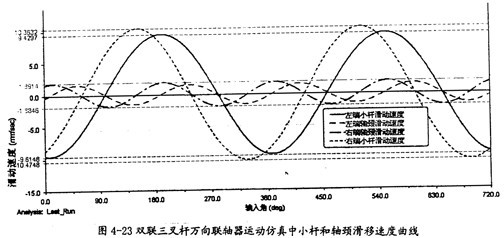
小杆和轴颈滑移速度曲线(如图4-23);
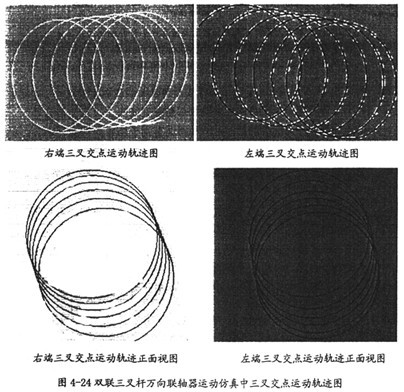
双联三叉杆轴颈轴线交点(简称三叉交点)的运动轨迹(如图4-24)。
4.5.3仿真结果分析
由图4-19可以看出,双联三叉杆式万向联轴器在转动的过程中,中间杆同输入轴、输出轴之间的夹角都在变化,且两个夹角的变化的大小相差很大,一个较为平滑(β=10°),而另-个则以较大的幅度(18°)呈周期变化,在每-个回转周期中,它的变化频率为l次。
由图4-20可以看出,中间杆同输出轴间的夹角变化也呈现一定的规律,在每-个回转周期中,它的变化频率为3次。结合图4-19、图4-20可知中间杆同输入轴及输出轴夹角的变化频率是不-样的,这是双联三叉杆式万向联轴器有别于单联三叉杆式万向联轴器的一种特性。
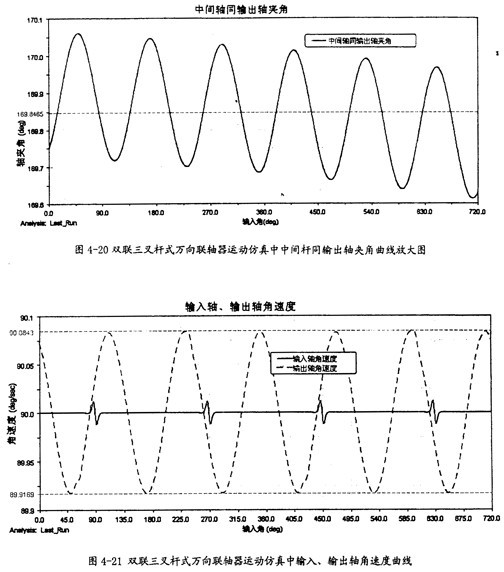
由图4-21可以看出,双联三叉杆式万向联轴器同单联三叉杆式万向联轴器的输出曲线相似,当输入轴转速恒定时,输出轴转速呈现有规律的波动,在每一个回转周期中,它的变化频率为3次,同图3-8中的β=10°时的曲线相比,双联同单联的情况差不多,故三叉杆式万向联轴器在双联的结构形式下输出转速特性直观上无改善。
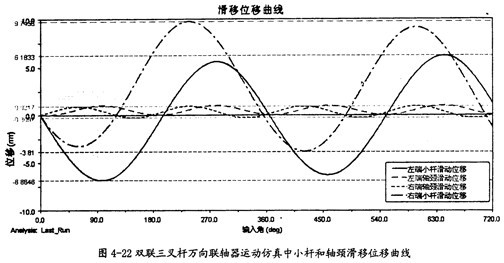
由图4-22可以看出,双联三叉杆式万向联轴器在运转的过程中,左右两端的小杆滑移位移量几乎相等,左右两端轴颈的滑移位移量也接近等值,且轴颈的滑移位移量比小杆沿滑道滑动的位移量要小得多,这同单联三叉杆式万向联轴器的特性是相同的。
由图4-23可以看出,双联三叉杆式万向联轴器在运转的过程中,左右两端的小杆滑移速度几乎相等,左右两端轴颈的滑移速度也接近等值,且轴颈的滑移速度比小杆沿滑道滑移速度要小得多,它们的变化频率同单联时的情况相比也无变化,在大小上同β=10°的单联三叉杆式万向联轴器的特性是相同的。
由图4-24可以看出,双联三叉杆式万向联轴器在运转的过程中,双联三叉杆的左右两端三叉交点的运动轨迹都呈螺旋线变化,且非常有规律,它们的正面视图均为标准的圆,这一种特性有别于单联的三叉杆式万向联轴器的特性。这种情况的出现主要是由于中间杆在转动的过程中是一种准圆锥摆运动(由于中间杆同输入轴及输出轴夹角变化不一样,如图4-19所示),而且因为系统的自由度不为0,系统实际进行的是动力仿真,于是产生了同中间杆轴线不垂直的离心力,这样在中间杆的轴向上就会有分量,在此分力的作用下必定会出现中间杆向一端的运动。(因为中间杆在轴向上可以自由运动,故在实际的应用中,如果重力在中间杆的轴向上有分量,那么中间杆也会移向一端。这样的情况并不是我们所想要的,所以要想在实际中应用双联的三叉杆式万向联轴器就必须对这种结构进行改进。)
4.5.4结论
由以上分析可知,三叉杆式万向联轴器在单联和双联时的运动特性,在夹角变化的规律上和三叉交点的运动轨迹上有根本性的改变,而在本章所测试的其它特性中几乎无变化。
4.5本章小结
本章开始介绍了虚拟样机技术及其在计算机上实现的软件ADAMS,并利用三维建模软件Pro/E联合ADAMS进行运动仿真,在验证这种方案可行性的基础上,分别对单联三叉杆万向联轴器和双联三叉杆万向联轴器进行了运动仿真分析。通过分析、比较,得出如下结论:
单联三叉杆式万向联轴器的理论运动分析结果同仿真分析结果是吻合的;
单联三叉杆式万向联轴器同双联三叉杆式万向联轴器的运动规律有的发生了改变,有的保持不变,特别是输出轴的转速特性在双联时同单联时几乎无变化。
