���绯���ܻ�����װ�����߹������ϵͳ�ļ���
4.1 ����
�����������ϵͳ�о�������������ۺ;���ʵ�����涼ȡ���˽ϴ�Ľ�չ���������γ�һ���������о�����Ϊ�ü���������ʵ���еĹ㷺Ӧ�õ춨�˼�ʵ�Ļ������������ר��ѧ�������ƿ�����һ�����������ר��ϵͳ��ȡ����һ���ľ���Ч������Ч�档������Щ�����о���ʵ���������������ڹ���������������������⣬��������֪ʶ�����ϵͳ�ǿ��ܵġ������ĺͺ��ʵġ�Ȼ����Ŀǰ���о�����ƫ������������е��ض����⣬�����ģ�͡�֪ʶ��ʾ�����������ȣ�����ƫ����ϵͳ�����������ض��εľ���ʵ�ּ����ͷ��������Թ����������ϵͳ�Ŀ����ͽ�����δ�γɾ��������ص��ϵͳ���ۺͿ�ѧ�ķ�����ϵ��
���ڴ�ͳ��ר��ϵͳ�������ƺ�������һЩ���Խ���ġ��������Ŀ��������Ͳ��ԡ�Ȼ���������ר��ϵͳ�ڹ�����ʽ���������������͵�ר��ϵͳ�������ר��ϵͳ��������ר��ϵͳ�ȣ��нϴ�IJ��죬����Ҫ��������϶���ĸ����ԡ�����������ɢ�ԡ�������ۺͷ����IJ������ԡ����֪ʶ���ѻ�ȡ�ԡ���Ͻ���IJ�ȷ���Ժ���ϻ����Ķ���Եȣ���ʹ�ڽ���������ר��ϵͳʱ����ѡ����ʵ�ԭ��ϵͳ��Ϊ�ο���û�б��Ŀ���ģʽ����ѭ�����Ҳ���ȷ��Ԥ��������п���Ҫ���������Ѽ���Ӧ�Ľ���취����Щ����ʹ���������ϵͳ�Ľ��칤����Ϊ���������ѡ�Ŀǰ���еĹ����������ϵͳ��֪ʶ��ṹ�����������������dz֪ʶ�Ľ�ϡ�֪ʶ�Ļ�ȡ���ݴ���������ȷ���Դ����ȶ������Ų�ͬ�̶ȵ�ȱ�ݣ������������ڿ������ϵͳʱ����ȡ�����Ʋ��Ժͷ��������еĹ�ϵ����ϲ���ǣ�һЩ�о����ѿ�ʼ��ʶ���о����������������ϵͳһ�㷽������Ҫ�ԣ����������˵��о�������������Ͻ�����ǿ�������ϵͳ�������Ժͷ������о���ʮ�ֱ�Ҫ�ġ�
4.2 ������ϵķ���
�豸������ϼ�����չ������Ϊһ�Ŷ����Ŀ�ѧ�Ƶ��ۺ���Ϣ���������������Կɿ������ۡ���Ϣ�ۡ������ۺ�ϵͳ��Ϊ���ۻ��������ִ����������ͼ����Ϊ�����ֶΣ���ϸ�����϶���ϵͳ���豸��������װ�á����̽ṹ�����չ��̵ȵȣ���������ɶ����γɵ�һ������ѧ�ơ�������������������ɣ���һ����Ϊ���������������ѧ���̵��о����ڶ�����Ϊ���������Ϣѧ���о�����������Ϊ���������ѧԭ��������о����豸������ϼ����Ӳ�ͬ�ĽǶȳ����Էֳ������ࣺ������ѧģ�͵Ĺ�����Ϸ����ͻ����˹����ܵĹ�����Ϸ�����ÿ���ְ����Ÿɾ������Ϸ�������ͼ4.1 ��ʾ��

1)������ѧģ�͵Ĺ�����Ϸ���
�÷�����������ֱ�Ӳ���ϵͳ����������źŴ����ķ���������״̬���Ƶķ����ͻ��ڹ��̲������Ƶķ�����
A.����ֱ�Ӳ���ϵͳ����������źŴ����ķ�����ֱ�Ӳ�������϶����йص���������������������涨�������仯��Χ�������Ϊ�����Ѿ���Ҫ�������ϡ����ַ���Ҳ�й۲���������Ȼ�����������׳��ֹ��ϵ����к�©�С�
B.����״̬���Ƶķ�����ͨ������ϵͳ��״̬������ʵ�ģ�ͽ��й�����ϡ������ع�����Ϲ��̵�״̬�������ɲв����У��в������а������ֹ�����Ϣ������������У�ͨ�������ʵ���ģ�Ͳ�����ͳ�Ƽ��鷨�����ܰѹ��ϴ��м�����������һ���ķ��롢���ƺ;��ߡ�״̬���Ƶķ���ͨ����״̬�۲������˲�����
C.���ڹ��̲������Ƶķ��������״̬���Ƶ���Ϸ�����ͬ��������Ҫ����в����У����Ǹ��ݲ����仯��ͳ�������������ϵķ�����������й��Ϸ��롢���ƺͷ��ࡣ���ڿ��Խ�����������̲����ľ�ȷ��ϵ��������ַ����Ȼ���״̬���Ƶķ����������ڹ��ϵķ��롣��С���˷���ʵ�ã��Dz������Ƶ���ѡ������
������ѧģ�͵Ĺ�����Ϸ��������ŵ���������ϵͳ���ʵĶ�̬���ʺ�ʵ��ʵʱ��ϣ�ȱ���ǵ�ϵͳģ��δ֪����ȷ������з�����ʱ�����ַ�������ʵ�֡�
2�������˹����ܵĹ�����Ϸ���
�÷�����������ר��ϵͳ�ķ��������ڰ�������Ϸ���������ģ����ѧ�ķ����������˹������ķ����ͻ��ڹ������ķ�����
A.����ר��ϵͳ����Ϸ����ǹ��������������Ϊ����עĿ�ķ�չ����֮һ��Ҳ���о���ࡢӦ������һ��������ϼ����������¾�����������չ�Σ�����dz֪ʶ������ר�ҵľ���֪ʶ���Ĺ������ϵͳ�ͻ�����֪ʶ����϶����ģ��֪ʶ���Ĺ������ϵͳ��
���ڰ���������������ͨ������������ijɹ��������������⡣����ͨ������ȡ��֪ʶ��Ϊ����������ѧϰ������Ҫ��ϸ����϶���ģ�͡����������������У���Ҫ�ļ�����������������������������ļ�����������������ʧ����ѧϰ�ȡ����ڰ�������Ϸ�����ԭ���ǣ���������ϵĶ������������Ӱ������м�������ö�����������������ƥ��İ�����Ȼ��Ըð�������Ͻ����������Ϊ�ö������Ͻ����
B.���ڰ�������Ϸ������������������Ա�ʾ�ɹ�����ʽ�����ױ�ʾ�ɰ�����ʽ�����Ѿ������˷ḻ�İ�����������ҽѧ��ϵȣ������ľ������ǣ���ͳ�Ļ��ڰ�������Ϸ������Ա�ʾ����֮�����ϵ�����ڴ��Ͱ�������м����dz���ʱ���������Ծ���Ӧѡ����Щ֢״�����ǵ�Ȩ�أ����ڰ�������Ϸ������Դ���������ʱ��һ���Լ����������������Լ����ϵ�������Զ���Ͻ�����Խ��͡�
C.�����˹������ķ���
��������������������ص��ݴ������롢�Ʋ⡢���䡢����Ӧ����ѧϰ�ʹ������Ӷ�ģʽ���ŵ㣬������ѧ�����������о����ȳ���ͬ���ڹ�����������䷢չǰ��Ҳ��ʮ���ֹ۵ġ�
��֪ʶ��ȡ�ϣ��������֪ʶ����Ҫ��֪ʶ����ʦ�����������ܽ��Լ���������ר�ҵ�֪ʶ��ֻ��Ҫ������ר�ҽ�������ʵ��������ѵ�������磻��֪ʶ��ʾ���棬�������ȡ��ʽ��ʾ����֪ʶ��ȡ��ͬʱ���Զ�������֪ʶ������Ľṹ��Ȩֵ��ʾ������ijһ���������֪ʶ��ʾ��ͬһ�����У�ͨ����ǿ������ʵ��֪ʶ���Զ���ȡ�Ͳ���������������֪ʶ�������棬������ͨ����Ԫ֮����������ʵ��������Ŀǰ����������Ĺ�
�����ϵͳ�м���ʼӦ�ã����ڻ����豸���˷�Ӧ�ѡ����ֻ�����ת����е�͵綯��������ȡ���˽Ϻõ�Ч��������������ӹ���������ѧ����֪ʶֻ��һЩ�ֲ�Ȩ�أ���������������ר����˼ά�IJ���ʽ�����������������̲��ܹ����ͣ�ȱ�����ȡ�
D.����ģ����ѧ����Ϸ�������Ҫ������ȷ����ѧģ�ͣ��ʵ�����������������ģ��������ģ�������Ϳ���ʵ��ģ����ϵ����ܻ������ǣ����ڸ��������ϵͳ��Ҫ������ȷ��ģ����������������Ƿdz����ѵģ�������Ҫ���Ѻܳ���ʱ�䡣���ڸ����ģ������������������϶��ԣ������ҳ����������֮���̹�ϵ��Ҳ����˵�����С���ϱ�ը������������������ϵͳ�ĸ����ԡ�����ԣ���ʱ��Ƶ�������ռ�������ģʽ�����ռ��ӳ���ϵ���������Ž�ǿ�ķ����ԣ��������������״������ֻ�����ù淶������������״�����Դ��������������Ρ����λ�ֱ�ߵȹ�����״��������Խ��ƴ��棬�Ӷ�ʹ�÷�����ϵͳ����Ͻ���������롣
E.���ڹ������ķ������ɼ�������ݹ�����ԭ�������֪ʶ������֪ʶ�Զ��������ɹ����������Զ����ɹ��������������̡���Ϲ��̴�ϵͳ��ijһ���Ͽ�ʼ�����Ź������������ʡ�Ϊʲô������������������һ���ݽ�������ͨ���Դ˹�����������ʽ���������ղ�����ϵĸ���ԭ�������ʹ����У���Ч������ʹ��ϵͳ��ʵʱ��̬���ݽ���������Ϲ��̵Ľ��С����ڹ���������Ϸ��������������˼ά��ʽ���������⣬��ʵ����Ӧ�ý϶࣬�������������ע���ʹ�á�
4.3 ���ܷ���ϵͳ�Ļ������˼������
4.3.1 �����������ϵͳ�Ļ������˼��
�����˹����ܼ�����Ѹ�ٷ�չ���ر���֪ʶ���̡�ר��ϵͳ���˹�����������������еĽ�һ��Ӧ�ã���ʹ���Ƕ��������������и���������ϵͳ��ƴ������ν���ϵͳ�����ܾ���������Ч�ػ�ȡ�����ݡ����������������������Ϣ���Ӷ����жԸ��������µ���϶�����гɹ�״̬ʶ���״̬Ԥ����������������ϵͳ�����ܲ�����ζ����ȫ�����˵�������������ų������ϵͳ֮�⡣ʵ��֤�����κ��˹�����ϵͳ���о�����������ȫ�������Զ�ϵͳ�IJ��룬ֻ���ǡ��˰�����͡������ˡ�����������ϵͳ����Ҫ��ɲ��֡��ɴˣ����������������������ϵͳ��
�������ˣ�����������ר�ң�������ģ���Թ��ܵ�Ӳ�������Ҫ���ⲿ�豸�����������Լ�֧����ЩӲ������������ɵ�ϵͳ����ϵͳ�Զ���϶������״̬ʶ����״̬Ԥ��ΪĿ�ġ���Ȼ���ö����µ��������ϵͳ���������ص㣺��1������һ�����ŵ�ϵͳ��ϵͳ��������ʵ��ʹ�õĹ����У���ͬ����������Ϣ�����Ĺ����в��Ͻ������Ҿ߱�������ߵ�DZ�ܡ���2�������ɼ����Ӳ����������ɵ�ϵͳ�����ֲ�ͬ�ڳ���ļ��������ϵͳ��������ȷ�����㷨�ͳ���;�����������ϵͳ�Ǹ�����Ϲ��̵���Ҫ��������������ר�ҵ�֪ʶ���������ﵽ��ϵ�Ŀ�ġ���3��������һ���˹�����ϵͳ���벻��ģ�����Թ��ܵ�Ӳ���豸����������һ�����ֲ��ų��˵����ã�ͬʱ��Ӳ��������������Ϊ����ķ롤ŵ����ʽ��ͳ�������
4.3.2 �����������ϵͳƽ̨�Ļ������
����ʹ�õ��������ϵͳƽ̨�ǽ�Ϊʵ�õ�ͼ�λ����ܹ������ƽ̨����Ϊͨ�õ����ܻ����ϵͳƽ̨�������˼���ǣ��������˼ά������ϵͳ���������ɺ���ѧģ���л��ؽ�ϣ����á������ر���ϵͳ����״̬����ͼ�ڵõ��㹻�õ�ר��֪ʶ�Ļ����ϣ������Ż���ѧϰ������ר��֪ʶ�����������ṹ��ϵͳ���˹����ܵ����¼����л����ںϣ����к�ǿ��ͨ���ԡ���Ӧ�ԡ��ݴ��Լ���ʵ���ԣ�ͬʱ�����е�ͼ�λ�ģ��������ר��֪ʶ���﷽ʽ���ֲ�ʽ��������������Ѹ�ٵ��������Ż���Զ�̷���������ʹϵͳ�ﵽ�˽ϸߵ����ܻ�ˮƽ���������ϵͳƽ̨�������������������һ��ר��֪ʶ�⣨��ͼ4.2��ʾ�����������������ǣ�

��1��ģ�����������棻��2��ר�ҹ����������棻��3���������������棻���������ϵͳƽ̨���ɵĿ�ѧ�ԣ����ǿ��Դ������������������ͣ�
a.ר��ϵͳ��ģ������֪ʶ������ģ������˵���˼ά���˹��������֪ʶ������ģ��������˵ľ���˼ά���ƣ�������������˼ά�����У���˼ά������˼ά��������˼ά��ȱһ���ɲ����Ƿdz�����ػ����϶��γɵ��л����塣
b.ģ������Ǹ���ģ�����������ռ������״̬�ռ�������״̬�ռ��ij��ӳ���ϵ������������Ϲ��ϡ�
c.�������������ԭ�����ݴ����ṹ����³�������롢�Ʋ⡢���䡢����Ӧ����ѧϰ�����кʹ�������ģʽ�Ĺ��ܣ�ʹ������ʵ�ʴ����Ŵ����Ķ���ϡ�����̡�ͻ���Թ��ϡ��Ӵ���ϵͳ�ļ�⼰����з��ӳ��ϴ����á�
4.3.3 �����������ϵͳƽ̨����Ҫ����
ϵͳ����Ҫ�������������ܻ������㷨�����ݴ�������ͼ�λ�ģ��������ר��֪ʶ�⡢�ۺϵĶ�̬���ӿ�����ͨѶģ�顣
���ܻ������㷨��ϵͳ����ؽ�ר��ϵͳ����������������������ģ�����������л���ϡ��������У���ַ��Ӹ��������㷨�����ƣ��˷����еIJ��㣬ʹ������������������ڶ���������������Ŀ�꼰����̵ĸ���ϵͳ��ͬʱ������M-ARY���۶�������������Ż�������ͨ����ʷ���ݷ���������ǿ��ѧϰ������ר��֪ʶ�����������ṹ���ܳ�ֱ�֤���������ȷ�ԡ�ͨ�û�����Ǹ�ϵͳ����Ҫ��ɫ��װ�ز�ͬ�����ר��֪ʶ���ܶԲ�ͬ���������������ܻ��������ߡ�
���ݴ���������ƣ�Ϊ���õؽ�����ݵĿ�����������ϵͳ�У���ģ����ֵ�Բ������ݽ���ģ��������֤ϵͳ���ݵĿ���������
ͼ�λ���ģ��������ר��֪ʶ�⣺ϵͳ����ͼ�λ�ģ��������ר��֪ʶ���﷽ʽ����ͻ�ƹ���֪ʶ��ר��֪ʶ��ѧϰ����ȡ�����������õ�ƿ�����⣬ϵͳ��һ�����صĽṹ��������ء��������ռ��ʹ洢ר��֪ʶ������Ҫ�κ�ģ�ͣ������û����ѧģ�ʹ��ڵĵط��ر����ã���ʹ�û�������������ר��֪ʶ���ʵ�������˼·�뷽����
�ۺϵĶ�̬���ӿ�����ͨѶģ�飺ͨѶ������ṹ���ֲ�ʽ��ƣ���Ϊ������Σ�һ���棬ͨѶģ����������֮����ÿͻ���/�������ķ�ʽ������TCP/IPЭ�飬����ͨѶ����һ�����úã���ʼ�մ�������״̬��������һ����Ҫ�������ݣ���������ͨѶģ��������������������ͨѶģ������ۺϸ������������������������Ӧ�Ķ���������������ٽ��Ӷ���õ����ݷ����������������һ���棬����ͨѶģ�����ض�����֮����õ��ö�̬���ӿ�İ취����ͨѶ����Բ�ͬ�Ķ�����ò�ͬ�Ķ�̬���ӿ�Ϳ���ʵ������ͨѶ��
���绯Զ����ϣ�ͨ���豸������ϼ��������������Ľ�ϣ�������̨���ļ������Ϊ���������ش���ҵ��Ҫ�ؼ��豸�Ͻ���״̬���㣬�ɼ��豸״̬���ݣ����ڼ�������ǿ�Ŀ���Ժ���������ģ����豸���н���Զ�̷�������ϡ�
4.4 ���ܷ���ϵͳ����ƿ���
4.4.1 ͼ�λ���ר��֪ʶ��������ģ��
ר��֪ʶ��������ģ��������ͼ4.3��ʾ����ģ��ĺ�������ͼ�λ��ķ�ʽ���������������ͼ��������ͼ���ɷֲ���������ϵĶ���ڵ㼰�ڵ�����������ɣ���ͼ4.4�������������ͼ�У��ײ�Ϊ�����ݡ��㣬��������ݣ������Dz��������������������������״̬������¼�ȶ��ֹ㷺�����ϵIJ������м��Ϊ���������㣬�����֢״�����������ֱ�ӹ۲쵽�������繤��������������Χ�������仯�ȣ���Ҳ�����Ǽ�ӵ��������ֹ㷺�����ϵ��������ϲ�Ϊ������ԭ�㡣�����������˴���صġ����ݡ��롰���������������롰����ԭ���������������������ͼ��
4.4.2 �������ģ������
����ģ����һ�������ں�̨����������ģ�飬���Ľṹ��ͼ4.5��Э�������������������������Ĺ�����Э������ִ������ר��֪ʶ��������ģ���֪����һʾͬ�Ĺ��ϣ��䡰���ݲ㡱������������㡱��������ԭ��㡱��������֮������߹�ϵ������ͬ��Э�����������ǽ������ݲ㡱������������㡱��������ԭ��㡱��������֮������߹�ϵ�Զ�ת��Ϊ�������̹�ϵ��������ִ�������������Ϲ�����
��1��ר��ϵͳ����
���������۵IJ�ͬ�������ɷ�Ϊ��ȷ
�����Ͳ���ȷ���������������̵IJ�ͬ���ɷ�Ϊ�������ǡ����������ͻ������������ͼ�λ�ר��֪ʶ��ṹ����������ȷ������
ר��ϵͳ������Ҫ�Ǵ�֪ʶ����������ݼ���D={D1��D2������Dn}����������֪ʶ����ÿһ���ݵ���Ӧ��һ�����������������ݷ�Χ������ȡʵʱ������֪ʶ������Ӧ���ݵ������������ݷ�Χ���������Է������ó�������ϵ���ļ��ϣ�

��4.1��
ʽ�У�S
1 ��S
2������S
n�ֱ�Ϊ����ʵʱ��������Ӧ֪ʶ�����ݵ��������ϵ�����Ӽ�����������Ϊ��

��

,S
n=
��m
1��m
2������m
n�ֱ�Ϊ֪ʶ������ݵ��������������
���ݡ�������������ﰴר�ҵ��롢�����㺯�γ��˸����¼�����E={E1��E2������EK}�������¼������������ϢΪ�¼���Ϣe={e1��e2������eK}���¼���Ϣ�����ݡ�������������������ϵ����������롢�����������أ���E1��������OΪ��
E1={��d11��d25�ţ���d32��d48��}����e1=max{min��s11,S25����min��s32,S48��}��
�������������֮�������������ģʽ��ÿ�������������ӵ�Ȩֵ��Ϣ

���¼���Ϣ��Ȩֵ��Ϣͨ�������ϵ�ó����������

������j=1��2��3������p ��4.2��
�������������֪ʶ����Ӧ�ؾ��п��ơ�������ʩ���㹹�������ܻ�ϵͳ��ר��ϵͳ����ģʽ��
��2��ģ��������
ģ������ҪӦ��ģ����������ģ������ϵ�������յó����������ģ����������ͼ4.6��ʾ��ר��֪ʶ��ṹ�����ȶ����ݡ���������ģ�������������������������������������֪ʶ���в�ͬ��������ͨ��������ѡ���빹��ģ�������������ó���Ӧ�����ݡ������ڲ�ͬ��������µ�ģ�������ȡ�
��������D
1�������������d
11��d
12������

�����ȿɸ��ݲ�ͬ��ģ����������������ֱ�Ϊ

��

��ͬ���أ���������D
2�������������d
21��d
22������

�������ȿɸ��ݲ�ͬ��ģ������������ֱ�Ϊ

����

���Դ����ƣ�����г���ͬ���ݡ������ڲ�ͬ��������µ�ģ�������ȡ�

��4.3��
ͬʱ������֪ʶ���е�ģ���������ݲ���������������¼�����֮�䰴������ȨֵΪ1��������ȨֵΪ0��ԭ�ɵľ���Dmk���¼��������������֮�䰴ר�Ҹ�����Ȩֵ���ɾ���Dkp�����γ�ģ����ϵ����Rc=Dmk��Dkp��
���գ�ģ�������Ľ����ͨ��ģ���任��ʽ��ã�

��4.4��
ʽ�С��q��Ϊģ�����ӣ�����Sup-T�ϳ����㷽��ʵ�֡�
��3������������
����ͼ4.6��ʾ��ר��֪ʶ�ṹ������������Ϊ���ṹ��
��һ��Ϊ���ݲ����������㡣ÿ�����ݻ������Ӧ��������������Ӧ������ȨֵΪ1����������һ�����ݻ��������Di,���j������������ר��֪ʶ����������ݻ������������ֵ��ij������Sigmoid����Ԫ���Ժ���������yij��
�ڶ���Ϊ�¼����ײ㡣����ר��֪ʶ�⣬���ɸ��������ļ��ϱ㹹����һ���¼���������Ȩֵ�������ǵĹ�ϵ���γ���k���¼���ÿ���¼������ͬ��������Ӧ������������������Ȩֵ��Sigmoid ��Ԫ���Ժ���ȷ�����������¼�Ei����Ӧ��������ļ���Ϊ{d1��d2������dj}�¼����Ϊ��
ʽ�У�w
k��������Ȩֵ����
k����ƫ���ź�
������Ϊ��������㡣ÿ���¼����E
i���������F
j֮�䶼�����߲�����Ȩֵ
������ģ���������������Ϊ��

������i=1��2��3������k��j=1��2��3������p ��4.7��
�����㷨ȷ������������ʽѡ��������ʽ��ѡ�����ֶ�ѡ����Զ�ѡ�����֡�
�ֶ�ѡ����Ҫ���ݾ�����������ϵͳ������״�������У�������֪ʶ�Ͷ���֪ʶȱ��������£���Ҫѡ������������������ѡ����������ģ������������ϣ�������֪ʶ�ȽϷḻ����ȷ������£���Ҫѡ��ר��ϵͳ����������ѡ��ר��ϵͳ��ģ������������ϣ�Ҳ��ѡ��ר��ϵͳ��ģ����������������ͬʱ���У��ڶ������������������ḻ������£���Ҫѡ��ģ��������������ѡ��ģ������ר��ϵͳ��������ϡ�ģ��������������������ϣ�Ҳ��ѡ��ר��ϵͳ��ģ����������������ͬʱ���С�������������������ͬʱ����ʱ��������������۵��Ż���
�Զ�ѡ���������ʽ�Ƿֱ����ר��ϵͳ��ģ�������������������������������ͨ���Ż����ߺ��γ����ս�����Ϊ���������������ѧϰ������ѧϰ����ĵ���ר��֪ʶ�⣬������һ����������˲��ϵ�ѭ�����С���������Ż���
�����������ֲ�һ�����⣬��ʱ����ì�ܡ�Ϊ�ˣ��������Ż��㷨��
a.��Ʊ���
�����Ҫ��������⣺1��2��3������p��
ģ��������������������Ff1��Ff2��Ff3������Ffp
����������������������Fn1��Fn2��Fn3������Fnp
ר��ϵͳ����������������Fe1��Fe2��Fe3������Fep
��Ʊ���Ϊ��X={xf��xn��xe}
b.Ŀ�꺯��
c.Լ������
0��xf��1��0��xn��1�� 0��xe��1��xf+xn+xe=1
d.����Ŀ�꺯����Լ�������������Ž⡣
�ֱ���f��X����xf��xn��xe��ƫ����������Ŀ�꺯��Ϊ�����Ժ�����Ϊ�������ֲ���Сָ���֣�����Լ����߶ȷ���⣬��������Ż����xfh��xnh��xeh��
e.����������
�������1��xthFf1+xnhFn1+xehFe1
�������2��xfhFf2+xnhFn2+xehFe2
�������3��xthFf3+xnhFn3+xehFe3
����������������������������
�������P��xfhFfp+xnhFnp+xehFe
�������������ϵͳ����ؽ��������������л���ϡ��������У����������㷨�����ƣ���ַ��Ӹ��������㷨�����ƣ��˷����еIJ��㣬ʹ���������ﵽ�˸�ˮƽ����ʵ�����������п�����ѡ�����е�����һ�ֻ�����������ʽ�����У�Ҳ�ɲ�����������ͬʱ���С����������ϵ��ϵͳ������ģ�������㷨�������¼���ϵͳ�����������磻���ڹ����ϵͳ�����ù���ת���㷨������������ģ��ͬʱ���ڡ���������ͨ����ʷ���ݺ�����ǿ��ѧϰ�ﵽ�Ż���Щģ���ڲ������ء�
4.4.3 ��������ģ������
����������ɵĹ�����Ҫ�Dzɼ�Ӧ��ϵͳʵʱ���ݡ����������������빱ƽ֪ʶ���н�����ϵͳģ������ڵ���жԱȣ��ٰ�������������Ҫ�������ڿ���ʽ����������ͨ��ָ��ͨѶЭ�鴫�ݸ��������������������������ϵͳ��ϵͳʹ��ʱʵʱϵͳ������ϵͳ��������ϵͨ���������������ݴ������������TCP/IP����ͨѶ�ȷ�ʽ���д��䣬���ʹ��ʱ�����Խ����ݲɼ�ϵͳ������ϵͳ��IP������������ͬ����λ�ã�����ϵͳ����������ԡ��ۺϵ�ͨѶģ��ʹ��ϵͳ�ܿ��ٷ�������ֳ�ʵʱ����ʵ�ִ��ݡ�ͬʱ���������滹��������ݵİӴ��������ݼ�¼��طš�
4.5 ���绯Զ����ϵ�Ӧ��
4.5.1 ��������缼���ķ�չ
���ż������������������缼������ý�弼����ͨ�ż�����Ѹ�ٷ�չ��Զ����Ϣ���ݵ�ʹ��Խ��Խ���㣬�ر���INTERNET���Ŀ��ٷ�չ��ʹ�ã�ʹ�ù������Զ������ֳ���ʵ�������ʱ�����Ƶ�Զ�̹���������˿��ܡ�
INTERNET��ȫ�������ļ�����������磬����������APPANET��չ���ݻ������ġ�INTERNET�ĺ��ļ�����TCP/IPЭ���Web ����������TCP/IPЭ����ʵ�ֻ�������ͻ������ԵĹؼ�������ͨ������INTERNET �ϵĸ�������ŵ��Ի�����ʵ��ͨ�š�
4.5.2 �������ϵͳ����ͨѶ�ӿ�
���ĵ��������ϵͳ����ͨѶ�ӿھ���ʹ��TCP/PЭ�飬ֱ��ʹ�ó������������ṩ�Ļ������ֶΣ���Winsock����ʵ��Զ������ͨ�Ź��ܡ���ϵͳ��ͨѶ�ӿ������������ص㣺
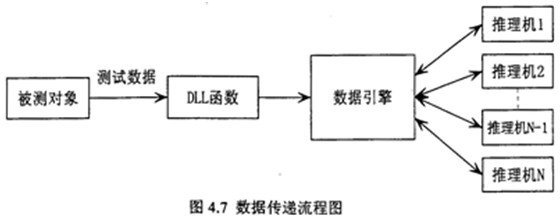
l������ṹ�ǰ��ֲ�ʽ�ṹ��Ƶģ����ÿͻ���/�������ķ�ʽ�����ݷ�����һ�����úã���ʼ�մ�������״̬��������һ����Ҫ�������ݣ���������������������������������������ۺϸ������������������������Ӧ�Ķ���������������ٽ��Ӷ���õ����ݷ������������������ṹ��ͼ4.7 ��ʾ����������ͻ���֮�����TCP/IP Э�顣
2����������ʹ�õķ�ʽ��һ������ͨ���ˣ�������������һֱ���У����ٽ����κβ����������������濴��һ�����ݷ�������Ӧ�ý���Զ�̲�����һ������²����в�����
3�������������ض�����֮����õ��ö�̬���ӿ�İ취����ͨѶ����Բ�ͬ�Ķ�����ò�ͬ�Ķ�̬���ӿ⡣
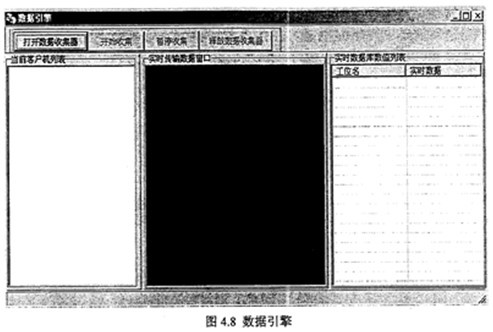
�������������ص㼰ͼ4.7 ��ʾ������������ɵĹ�����Ҫ�ǵ������ݶ�̬���ӿ⡣���ĵ����ܹ������ϵͳ���������������ͼ4.8 ��ʾ��
�����������ض�����֮����õ��ö�̬���ӿ�İ취����ͨѶ���������������ռ����������������ռ������������������ռ�״̬����������ʼ�ռ��������������ռ�״̬���ռ������ɼ�ϵͳ�����͵����ݲ����������ٴ������ٴ�����Ŀ���ǽ������ɼ�ϵͳ�����͵����ݴ������Ϊ������Ҫ������ݣ�ͬʱ�������������������������״̬��������������������й����������ʱ�����������桱���ռ�����������ר��֪ʶ���н�����ϵͳģ���������ݽڵ���жԱȣ��ٰ�������������Ҫ���ض����ݸ�ʽ����������Ҫ������ͨ��ָ��ͨѶЭ�鴫�ݸ�����������Ȼ����������˵�Ķ�̬���ӿ⣨DLL���ú������ǹؼ���һ��������������Ļ��������ǿ��Ա����Լ����ص�ͨѶ�ӿڻ��DZ��ܵ�ͨѶ�ӿڡ������±����������Լ���DLL���ú�����
��̬���ӿ�Ľӿں������£�
extern��C��__declspec(dllexport)bool__stdcall CreateContainer()��
��Ҫ���ڳ�ʼ����̬���ӿ�����������Դ������ֵΪ�Ƿ�ɹ��ı�־��
extern��C��__declspec(dllexport)void__stdcall StartData()��
��Ҫ������̬���ӿⷢһ����ʼ�ռ����ݵ��źš�
extern��C��__declspec(dllexport)void__stdcall StopData()��
��Ҫ������̬���ӿⷢһ��ֹͣ�ռ����ݵ��źš�
extern��C��_declspec(dllexport)char*__stdcall GetData(char*)��
�����������Ҫ����Ҫ������������DLLȡ�������еIJ�����ָ��DLL���ݵ����ݵ������б�����ʽΪ��
NAME1,NAME2,NAME3,������
DLL�������ص����������б�����ʽΪ��
VALUE1,VALUE2,VALUE3,������
������ᰴ�趨��һ����ʱ���������������������ȡ����
���磺��DLL���ݵ����ݵ�������
Tag__No1,Tag__No2,Tag__No3��������
DLL���ص������б�Ϊ��123.46,23.4,34,������
extern��C��__declspec(dllexport)void__stdcall FreeConiainer()��
��Ҫ�����ͷŶ�̬���ӿ�����������Դ��
4.5.3 ���绯��ϵ�Ӧ��
���绯Զ�̹�����ϵ�ʵ�֣���ؼ���Զ�����ݵĴ��͡����������ݽ����������������ϵͳԶ������豸�ֳ���ֻҪ�����ֳ����ϲ��������ܼ�ʱͨ�����紫�͵��������ϵͳ�У��������ϵͳ����ʵ�����绯Զ�̹�����ϡ������ܹ�������е���������������ʱ��ͨ������������̬���ӿ�DLL�����������ݣ���Щ����������ʱ��Ҫ�Ĺ���������������ֵ����̬���ӿ�DLL������ͨ������ֱ�Ӵӹ����ֳ����Բɼ�������еõ�������Ϣ���ݡ����ݴ�������ͼ��ͼ4.9 ��ʾ��
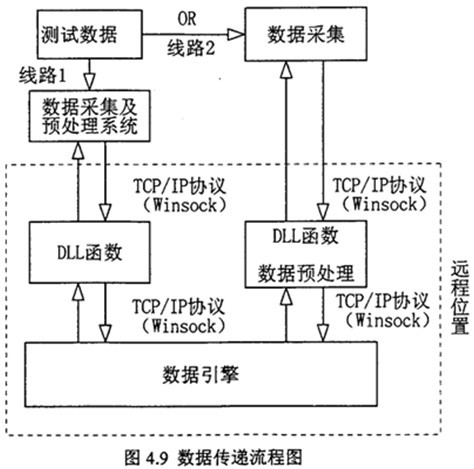
��������ͼ��֪���ӹ��ϲ������ݵ��������棬���������ݴ�����ʽ��һ���ǹ��ϲ������������ݲɼ�ϵͳ�ɼ����Ƚ���Ԥ�������������ź����ݴ���Ϊ����������Ĺ����������ݣ�Ȼ���ͳ�ȥ����̬���ӿ�DLL������ͨ�����������Щ�����������ݣ�ͬʱ������������������������Ĺ�������������������Ĺ�������������Ӧ��ֵ�ҳ�������������涨�ĸ�ʽ�����������ݵ�����������һ���ǹ��ϲ������������ݲɼ�ϵͳ�ɼ���һ����ʽֱ�ӷ��ͳ�ȥ����̬���ӿ�DLL������ͨ�����������Щ������Ϣ���ݣ�Ȼ���ٽ�������Ԥ��������������Ϣ���ݴ���Ϊ����������Ĺ����������ݣ�ͬʱ������������������������Ĺ�������������������Ĺ�������������Ӧ��ֵ�ҳ����ٰ���������涨�ĸ�ʽ�����������ݵ���������
�������õ��������淵�ص��������ݺ��趨�õ������������������������Զ����ϡ�
4.6 ����װ�����绯���ܻ����ϵͳ�ļ���
�������õ����绯�����ܻ��������ϵͳ������������ɡ�һ�����ǹ����źŲɼ�������Ԥ����ϵͳ����һ������ͼ�λ��������������ϵͳ����������������ģ�Ҫʵ�ֹ�����ϵ����绯�����ܻ������轫�������ּ���Ϊһ�������ϵͳ�������ݲɼ�������Ԥ���������ݴ��ͼ�������������ں�Ϊһ���л������壬ͬʱ�ֱ����������ֵ���Զ����ԡ����ɵ�Ŀ�������¼������棺
1�����ݲɼ���ԭ��ʽ�ɼ����䣬���ݵĴ�����ʽ���䣻
2�������û����ж��ο�����
3�����ݴ��Ϳɸ����û���Ҫ�����ѡ��
4�����������û���������ר��֪ʶʱ�Ĺ�������
5�����ݴ�����Ӧ����ʹ���ض�������(�������̶������Լ����û���̹�������
�������õļ���ϵͳ��ʹ�õ����ݴ�����·Ϊͼ4.8����·1�ķ�ʽ��
4.6.1�������������Ļ�ȡ������
��������У���Ҫ�����Ĺ����������ݣ����ڲ�ͬ�Ĺ��ϣ�����Ĺ���������ͬ��Ϊ��ʹ���ɺ��ϵͳ�����ø�����豸������ϵ��У��ڽ��й������������ݵ���ȡʱ��Ӧ�����ܶ�ؿ��Ǹ��ֹ������������������
������ת��е��������ȡ���������У�
l����Ϊ������ȡ��Ƶ����������
1/5��Ƶ��1/3��Ƶ��l/4��Ƶ��l/2��Ƶ��0. 43��0.48��Ƶ��0.75��Ƶ��l��Ƶ��2��Ƶ��3��Ƶ��4��Ƶ��5��Ƶ���ٽ�ת�٣�renxuan��ÿ��Ƶ��ֵΪһ��ֵ����������renxuan��Ϊ�ɱ䱶Ƶ��������ȡƵ����������ʱ��renxuan�����û��ɸ����Լ�����Ҫ���趨renxuan������Ƶ��ֵ��������Ҫ����Ƶ�ʣ���renxuanӦΪתƵ�ij�������
2������
��������� ��һ��ֵ��
3�����ȶ���
�ȶ������ȶ���ͻ����ȶ������ȶ��������ƶ�����������ͻ�䣬��һ��ֵ��
4���켣
��Բ��˫����Բ�����ȶ���˫��Բ����������ɢ�����ң���һ��ֵ��
5��ʸ������
���䣬ʸ����ʼ��������ټ�����������ʱʸ���������ȶ����к�ʸ����С��ͻ�䣬�ı䣬�ֱ��ò�ֵͬ��ʾ��
6�������
����ת�ٱ仯�����渺�ɱ仯���������±仯�����������仯������ѹ���仯������һ��ֵ��
ͳ����������������������������21�����������û�Լ���������趨��21�������ı�����������¼�����������������У��Ա��ѯ��
������������ȡ�����ݲɼ���Ԥ����ϵͳ����ɣ���ϵͳ���趨�IJɼ�ʱ�䣬�ɼ�һ�����ݣ�����һ�����ݲ�����һ�����ݡ�
����ʹ�õ����ݷ��ͷ�ʽ�ǽ����������ı����������ֵ����ִ�������ʽΪ��D|������1��ֵ1��������2=ֵ2��������������n��ֵn ,|^^^^��������TCP/IP�Ӽ���������stocket ���ӣ������������������͵��������˿��ϡ�
4.6.2 ��̬�������ӿ�ij�����Ƽ�������ƽ̨������
���ݱ���ϵͳ���ɵ�Ҫ��̬�������ӿ�ij������ǽ������ݽ��ա�����������������ƽ̨����Ҫ������������ֵ��Ȼ����Щ����������ֵ�������������ƽ̨��Ӧ�ı���������µ��ִ������͵�������������ƽ̨���ն��ϡ�
�ó���Ӧ�ϸ�4.5.2�������ĸ�ʽ��д��������GetData(char*������������������������������鹤�����������ʱ��Ӧѡ���Ż��������������Լ�������ʱ�䡣
�����������ƽ̨���ڽ��й�����ϵ�����ʱ�����ö�ʱ�ķ�ʽ��̬�������ӿ���������������ݣ���ʱ����趨���Ը����û��������趨��һ��Ӧ�������ݲɼ���Ԥ���������ʱ�����趨�������ݵ�ʱ�䣬�������뵽�����ݿ��������ϴ���ͬ�����ݡ���Ҳ���ܰ�ʱ���趨�Ĺ��������������ݶ˿ڶ�ջ����ʱ�������ݻ��������ݣ������������©�������
�����������ƽ̨��̬�������ӿ�����Ĺ����������ݱ����Dzɼ�Ԥ����ϵͳ���������������е����ݣ����û�У���̬�������ӿ��������������ݣ����ص����ݲ��㣬��û����Ͻ���������������������Ĺ������������ڲɼ�Ԥ����ϵͳ��������������û�У������DZ�������ݣ���Ӧ�ڶ�̬�������ӿ��е�GetData(char*���������ڽ��д������õ�������������Ҫ�����ݡ�
4.6.3 ��Ͻ�����ƽ̨�����
����ʹ�õ����ܹ������ϵͳ�������������ͬʱ������Ͻ�����͵�������Stocket�˿��ϣ��˿���Ϊ2049�����ݸ�ʽ���£�
l���ڽ���Stocket����ʱ������������ר�ҽ��飺
D|������1��ר�ҽ���1��������2��ר�ҽ���2��������������n��ר�ҽ���n, ^^^^
2����Ͻ�������
R|Result1,Result2,����,Resultu,| ^^^^
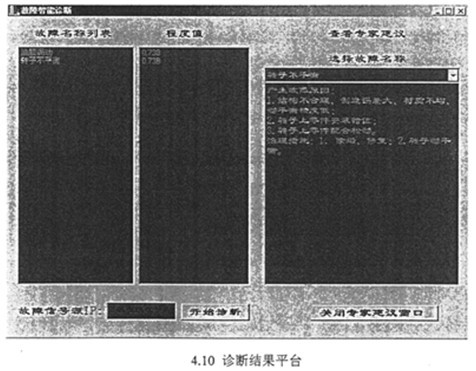
���ݸ��������ݶ˿ڼ����ݸ�ʽ�����ɰ��û���Ҫ�������Ͻ�����ƽ̨����Ͻ��Ӧ������Ϲ��ϵ����ơ����Ϸ����IJ�λ�����Ϸ�����ʱ�估�̶ȡ����ڲ�ͬ�Ĺ��ϣ���ʾ���Ϸ����Ŀ���ԭ������Ӧ��ר�ҽ����ά�����ȡ�ͼ4.10Ϊ���ļ���ϵͳ����Ͻ������û����档ͼ4.11Ϊ���ļ���ϵͳ��ר��֪ʶ�⽨�����������ƽ̨��
4.7 ������
�����ڲ����˹�����ϵķ����Ļ����ϣ��ص���ܵı�����ʹ�õĹ����������ϵͳ�����˼�뼰��ɣ��������������ϵͳ���������ԭ���Զ������������ݵĴ���ԭ��ָ���˱����������ϵͳ������ͨѶ�ӿڳ������Ʒ�����ͨ�õĶ�̬���ӿ�ӿڳ����ڴ˻����ϣ����������绯�����ܻ����ϵͳ�ļ��ɷ�������Ӧ�ij�����Ʒ��������Ա���ʹ�õ��������ϵͳ�����˼��ɡ�






